First episode of Mushi (虫) Reviews where I review the Stepper Motor 28BYJ-48 and ULN2003 Driver from icstation.com.
http://www.icstation.com/product_info.php?products_id=1400

Mushi Reviews Episode #1
Leave a reply
First episode of Mushi (虫) Reviews where I review the Stepper Motor 28BYJ-48 and ULN2003 Driver from icstation.com.
http://www.icstation.com/product_info.php?products_id=1400
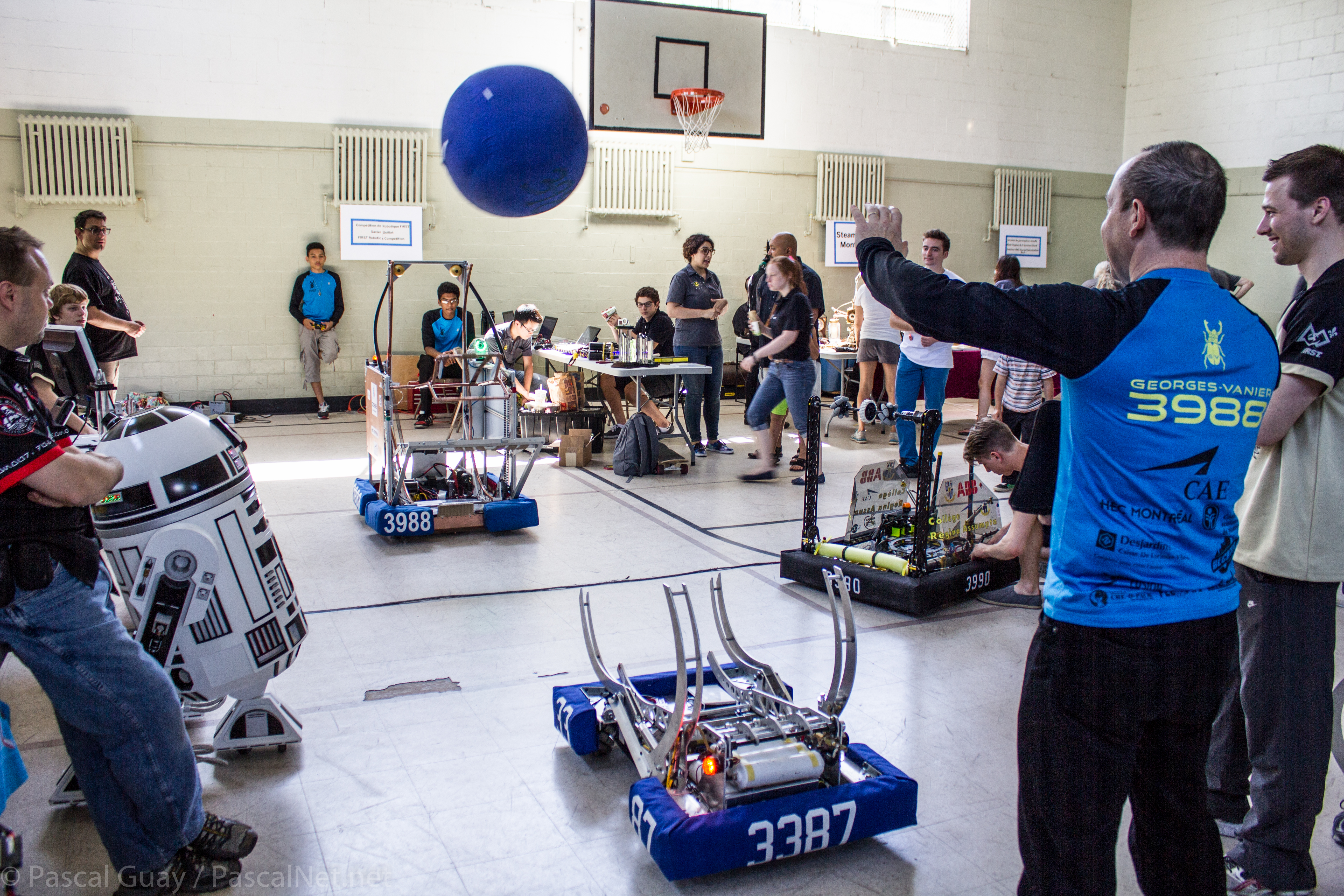
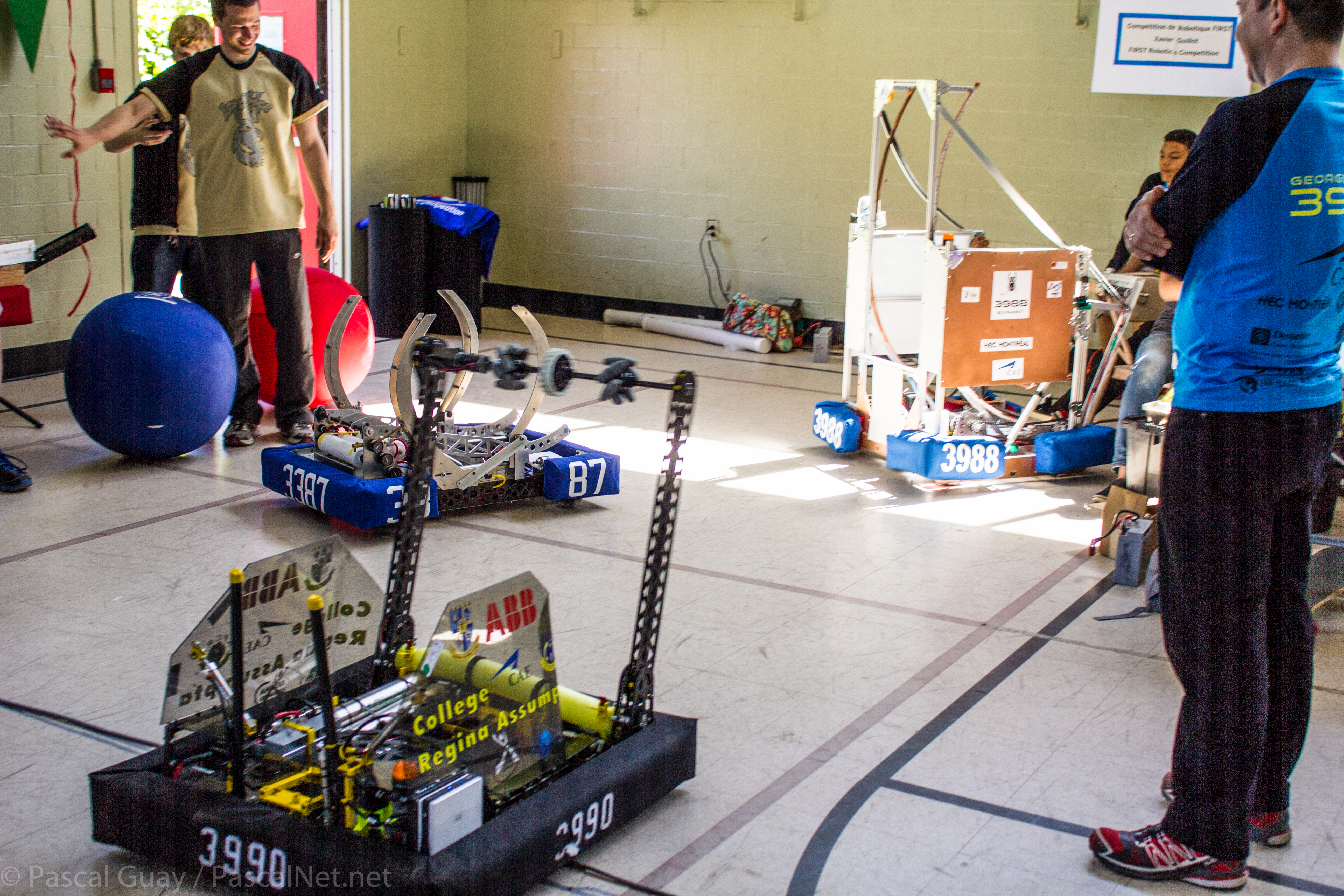
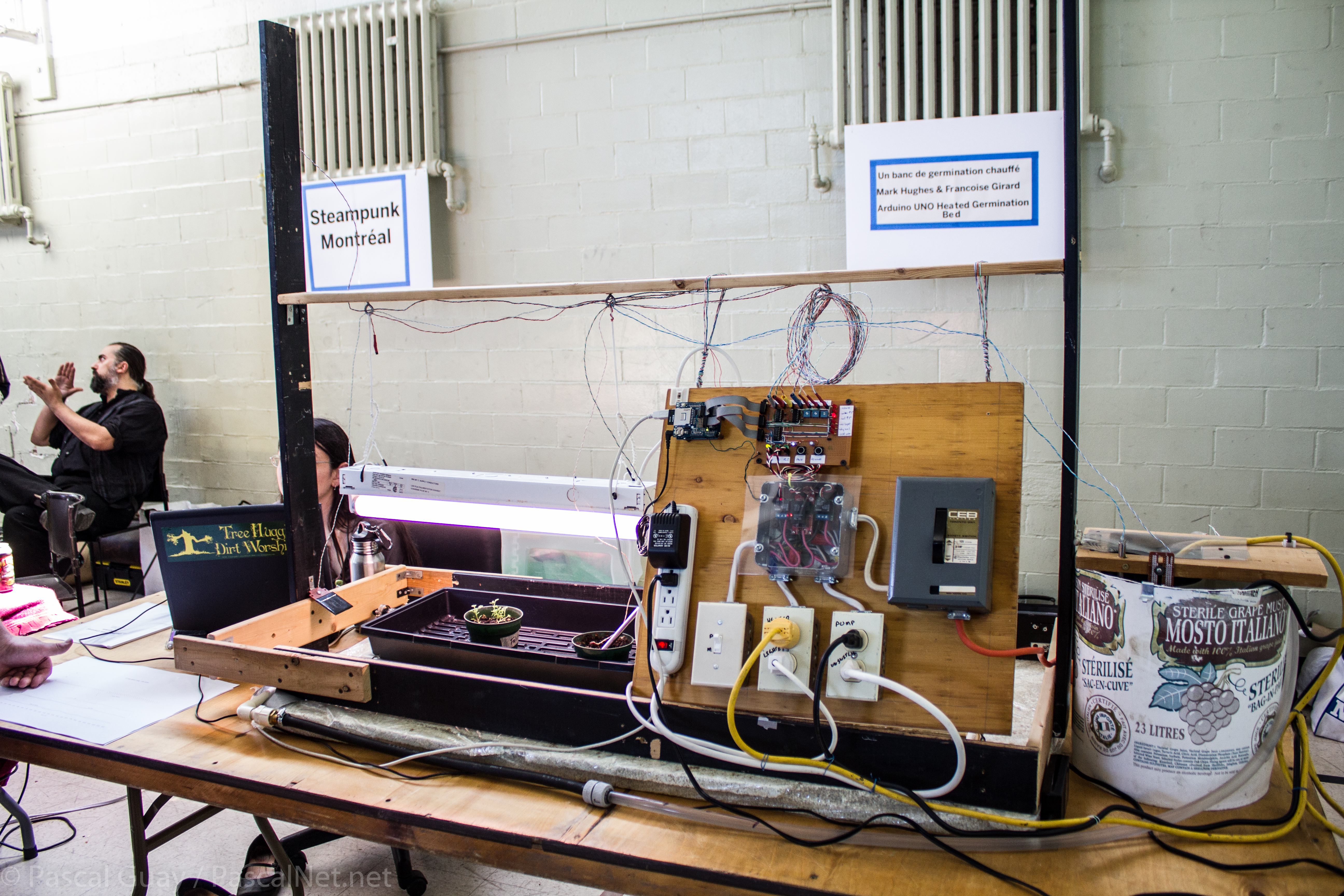
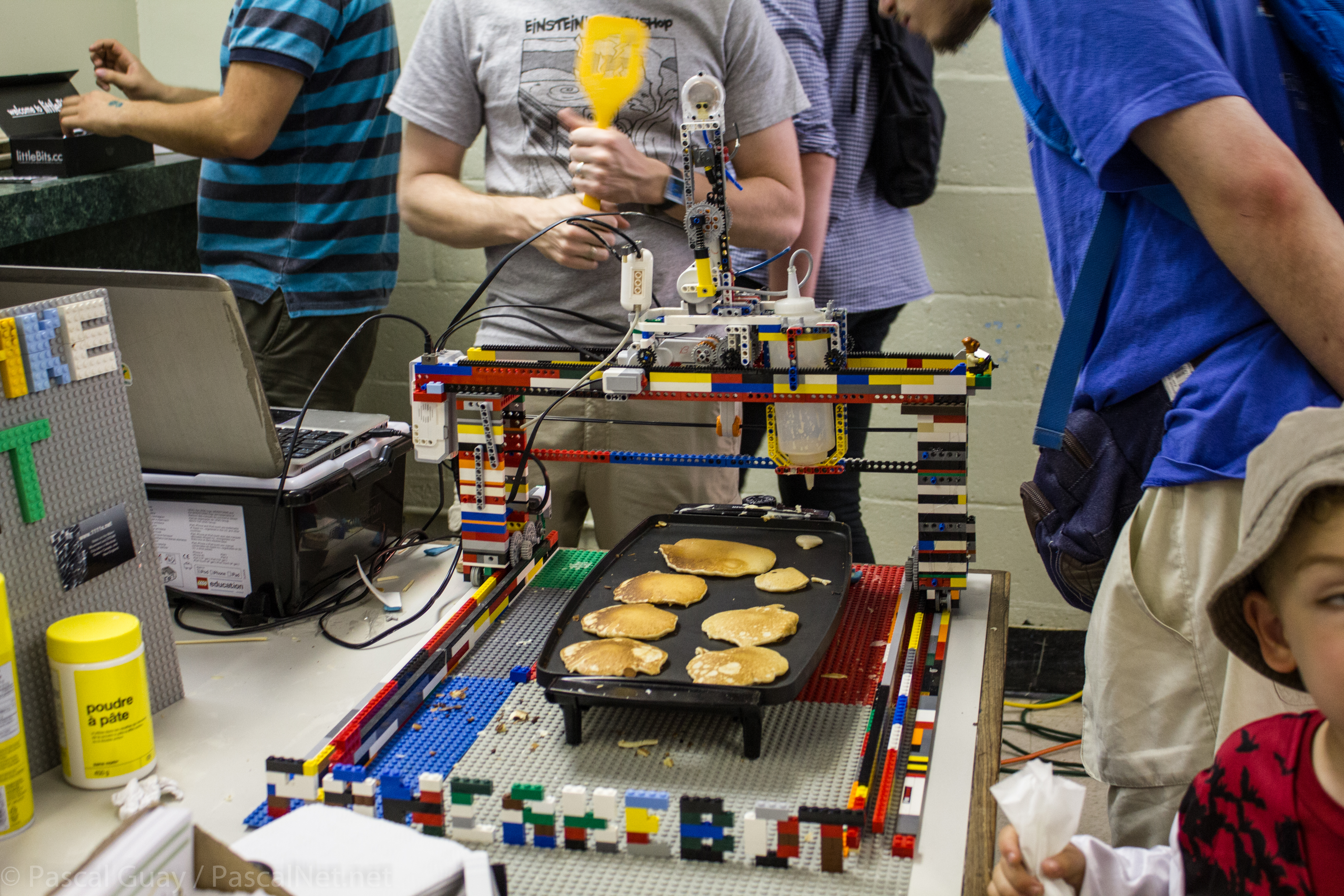
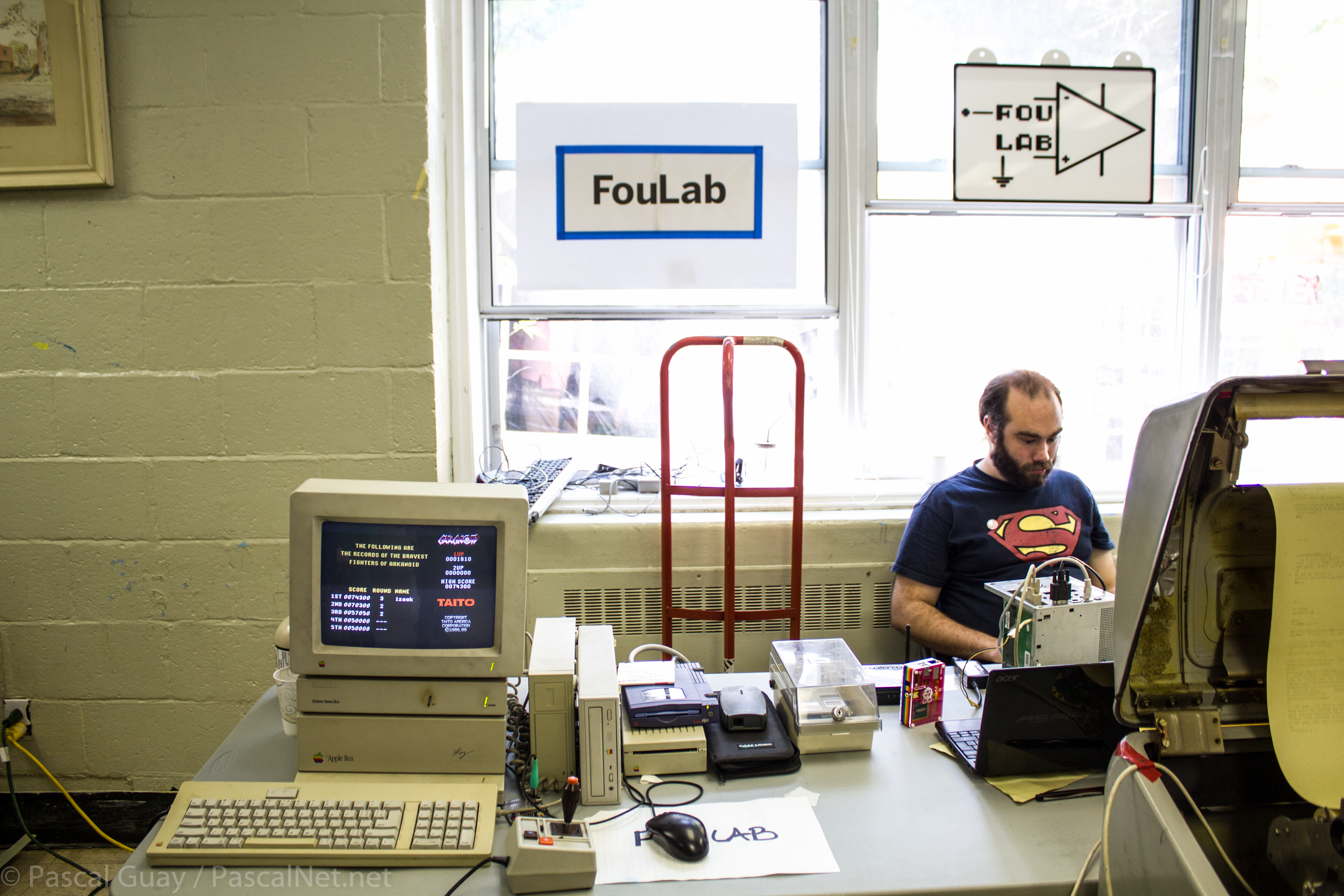
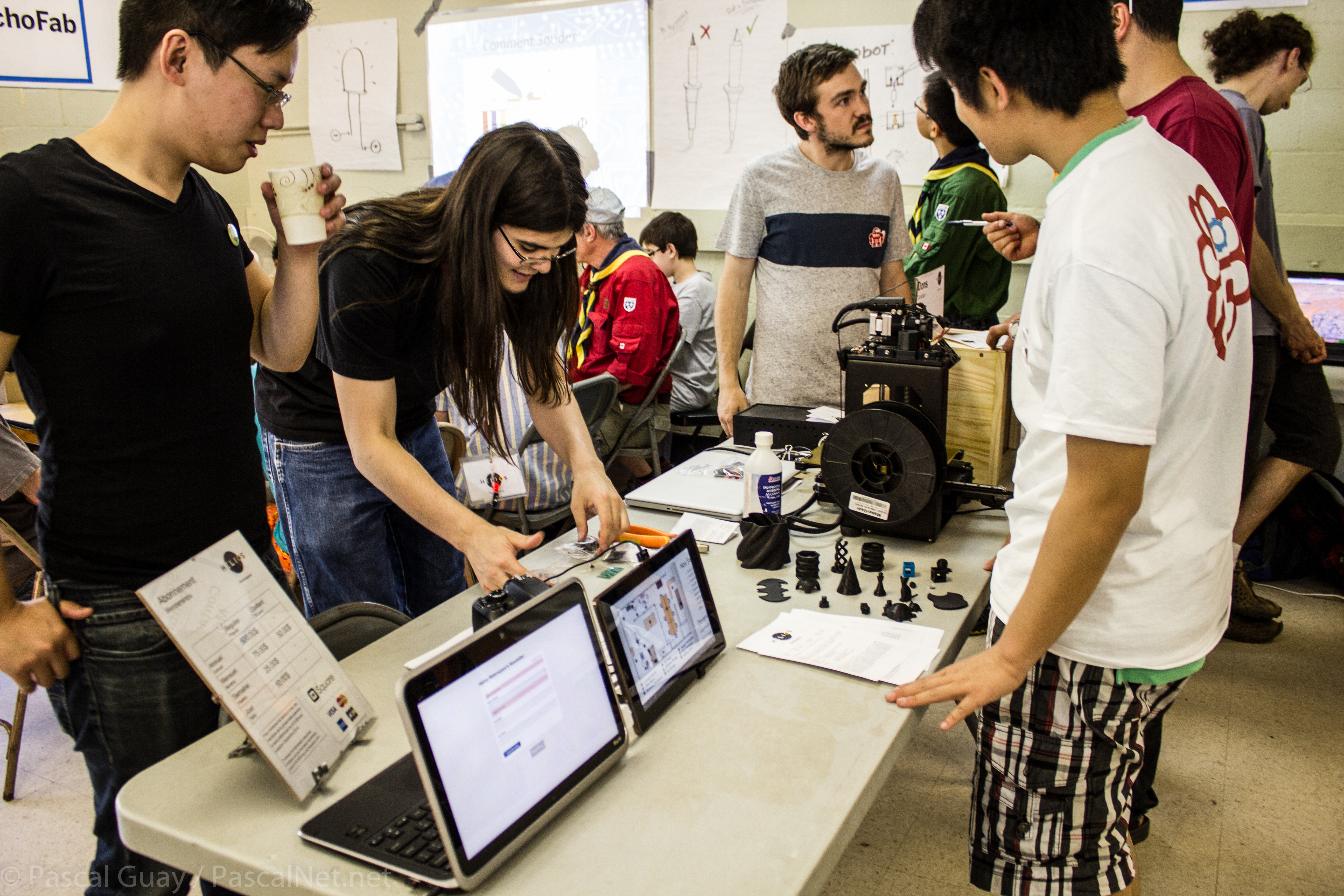
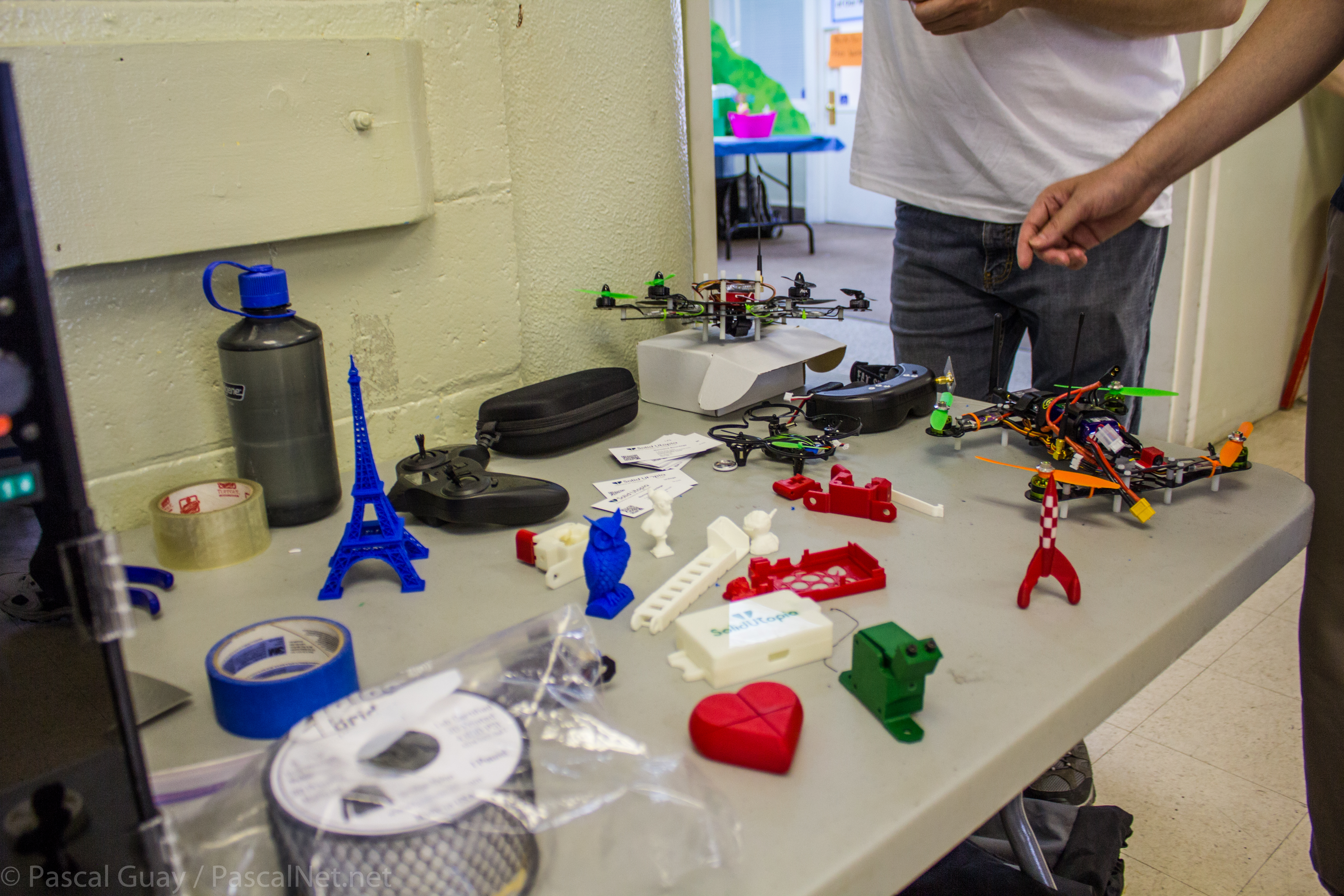
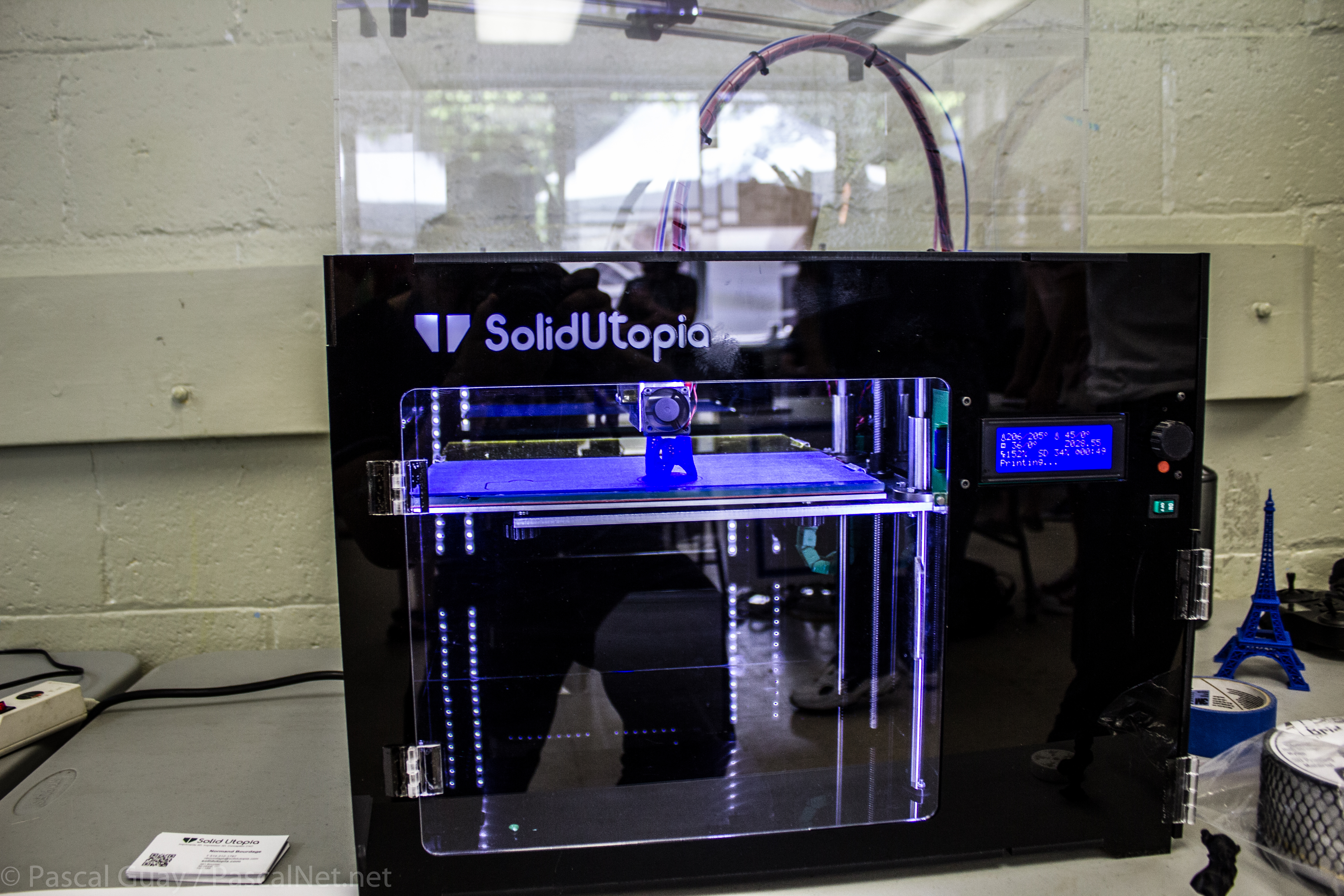
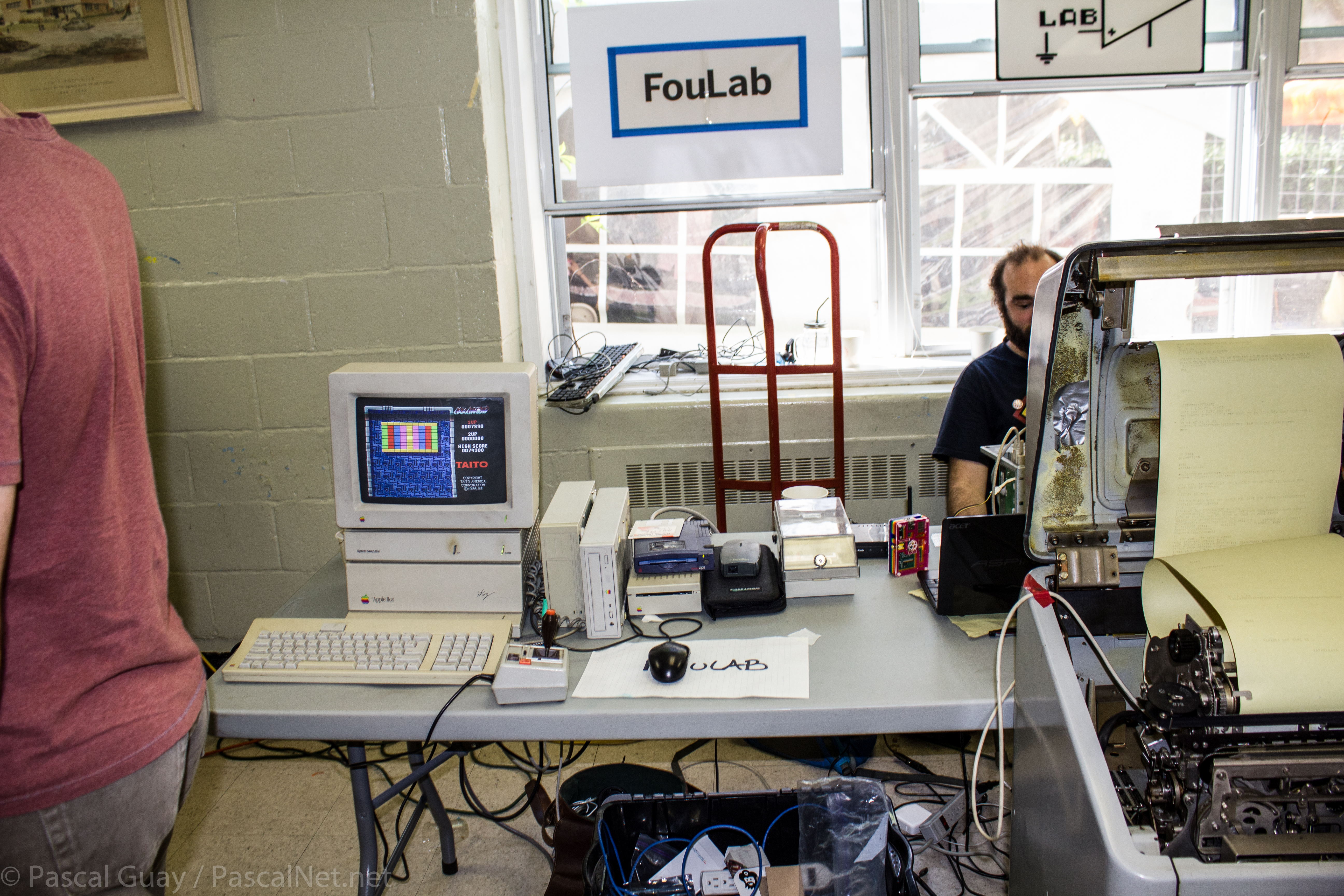
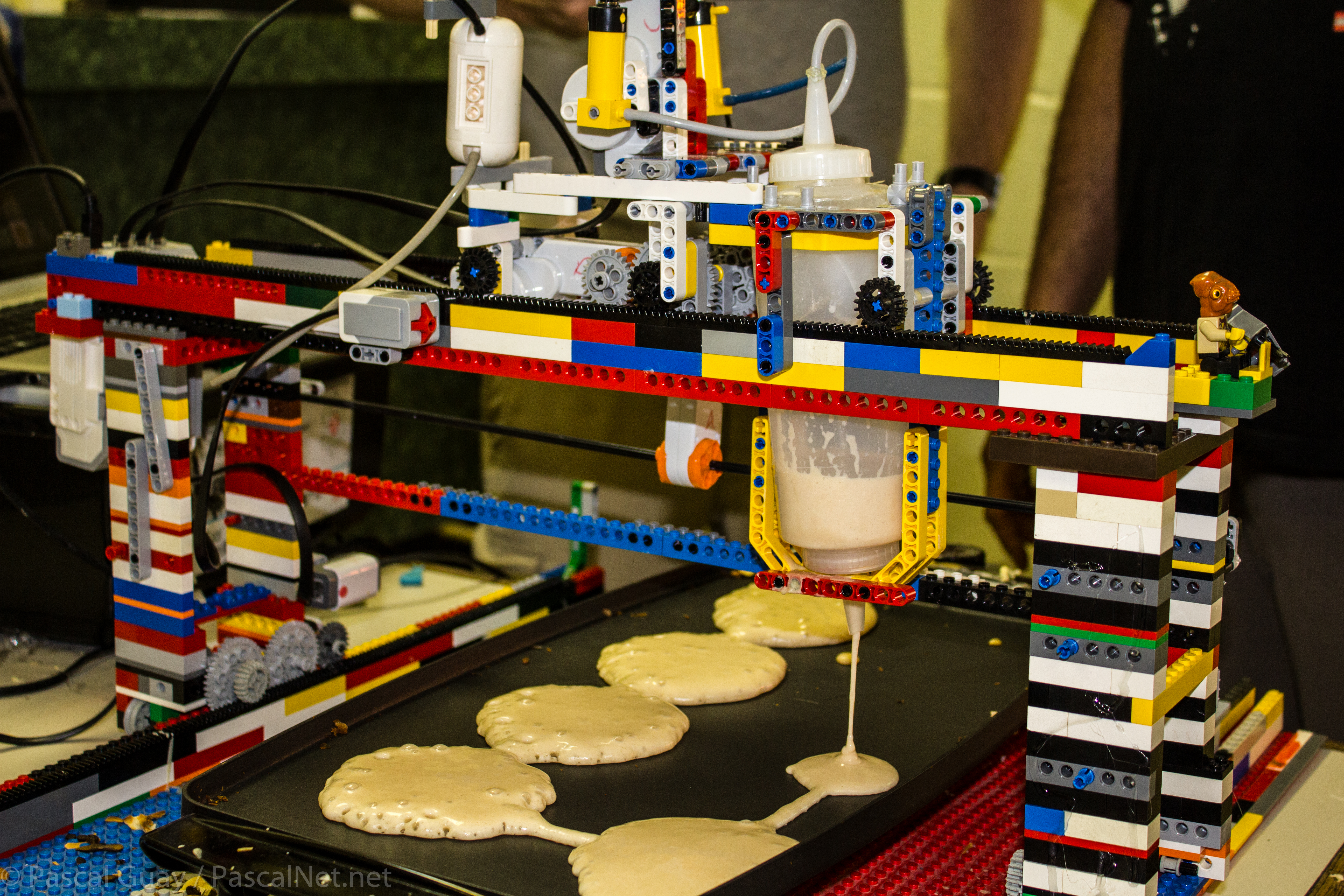
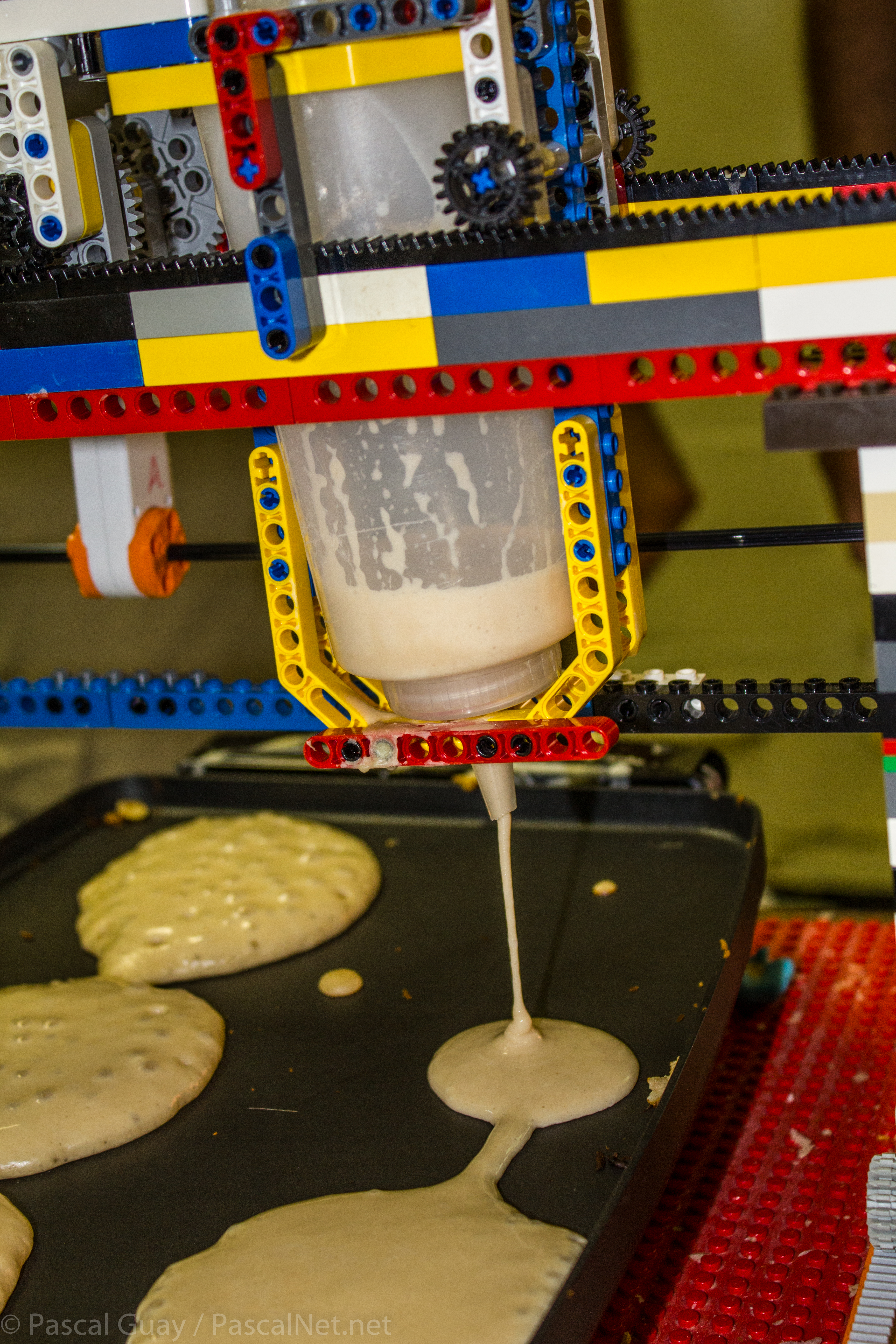
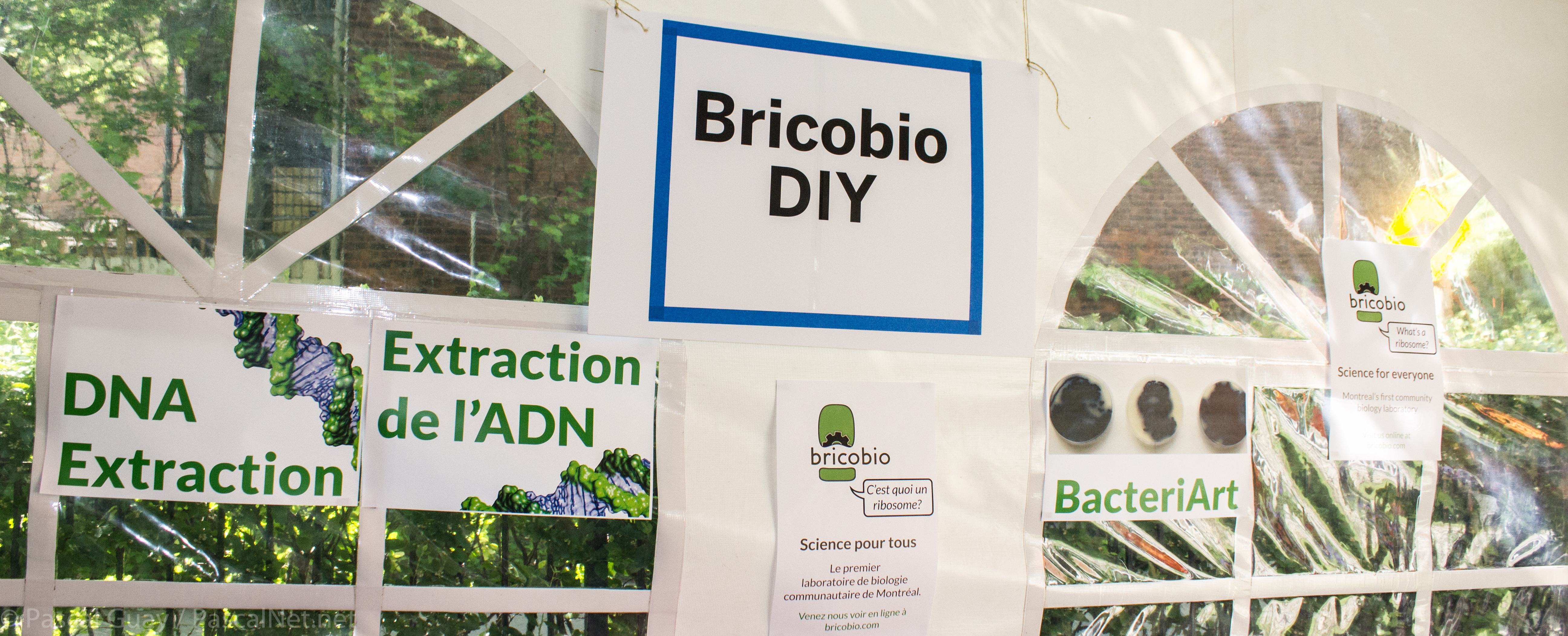
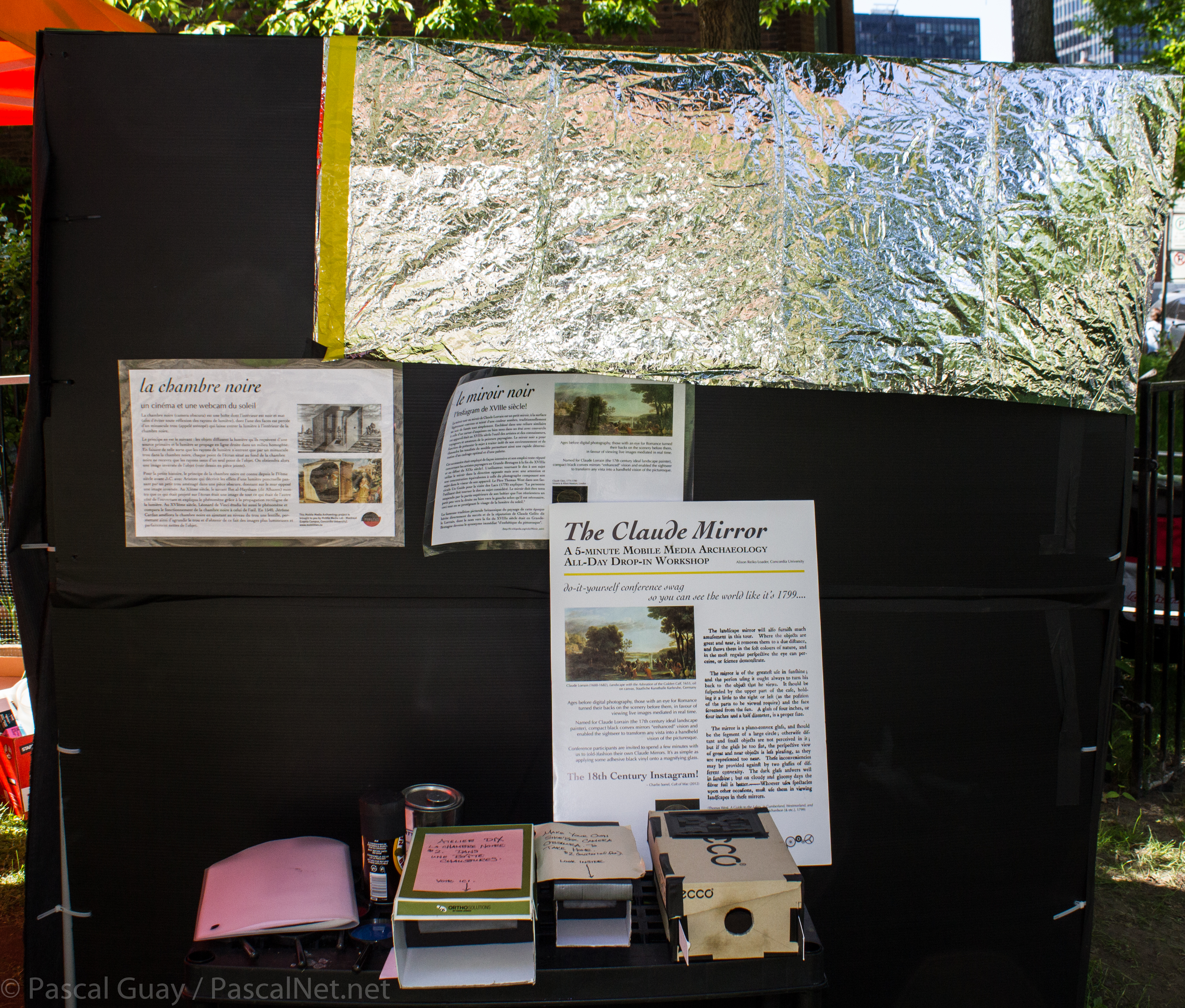
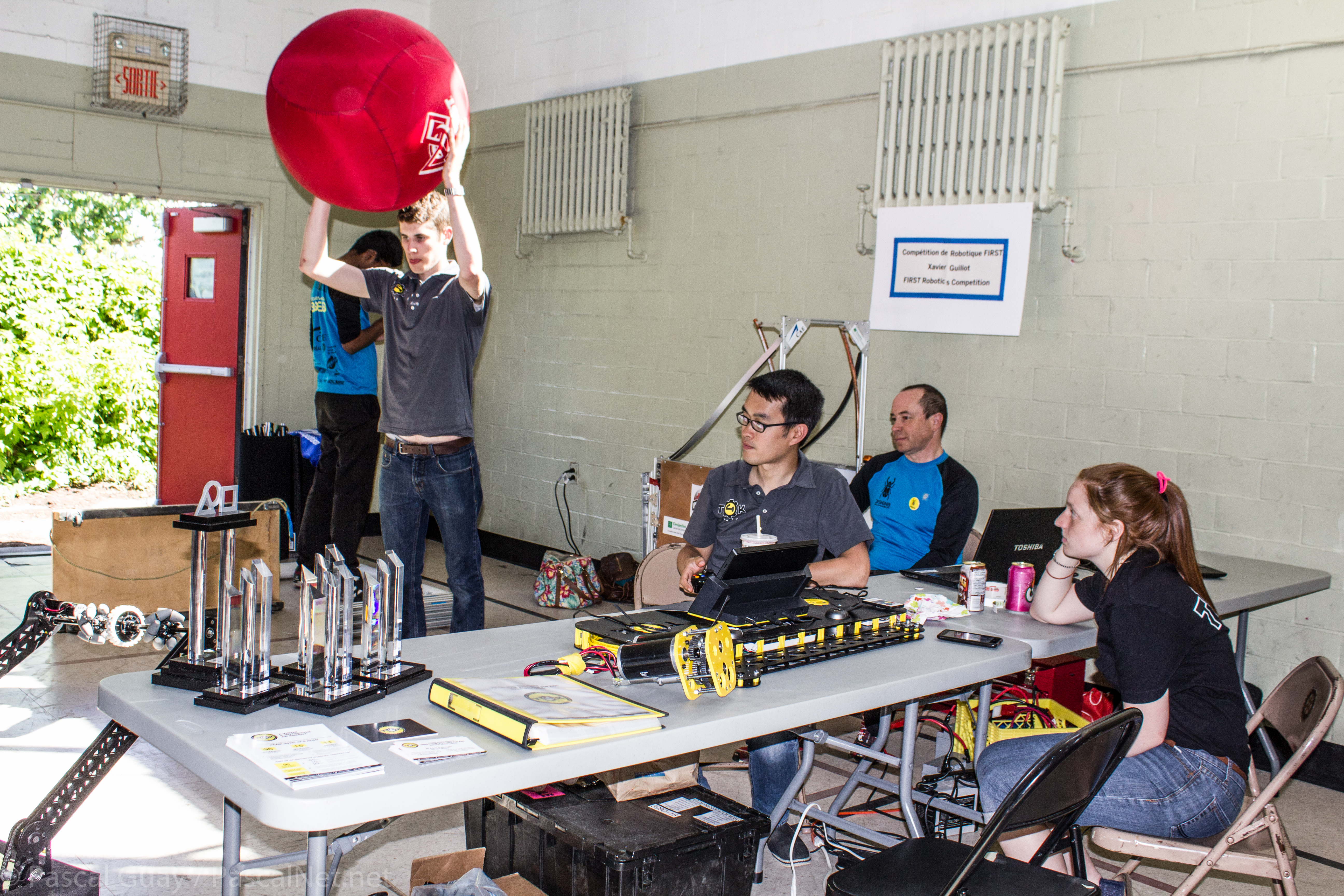
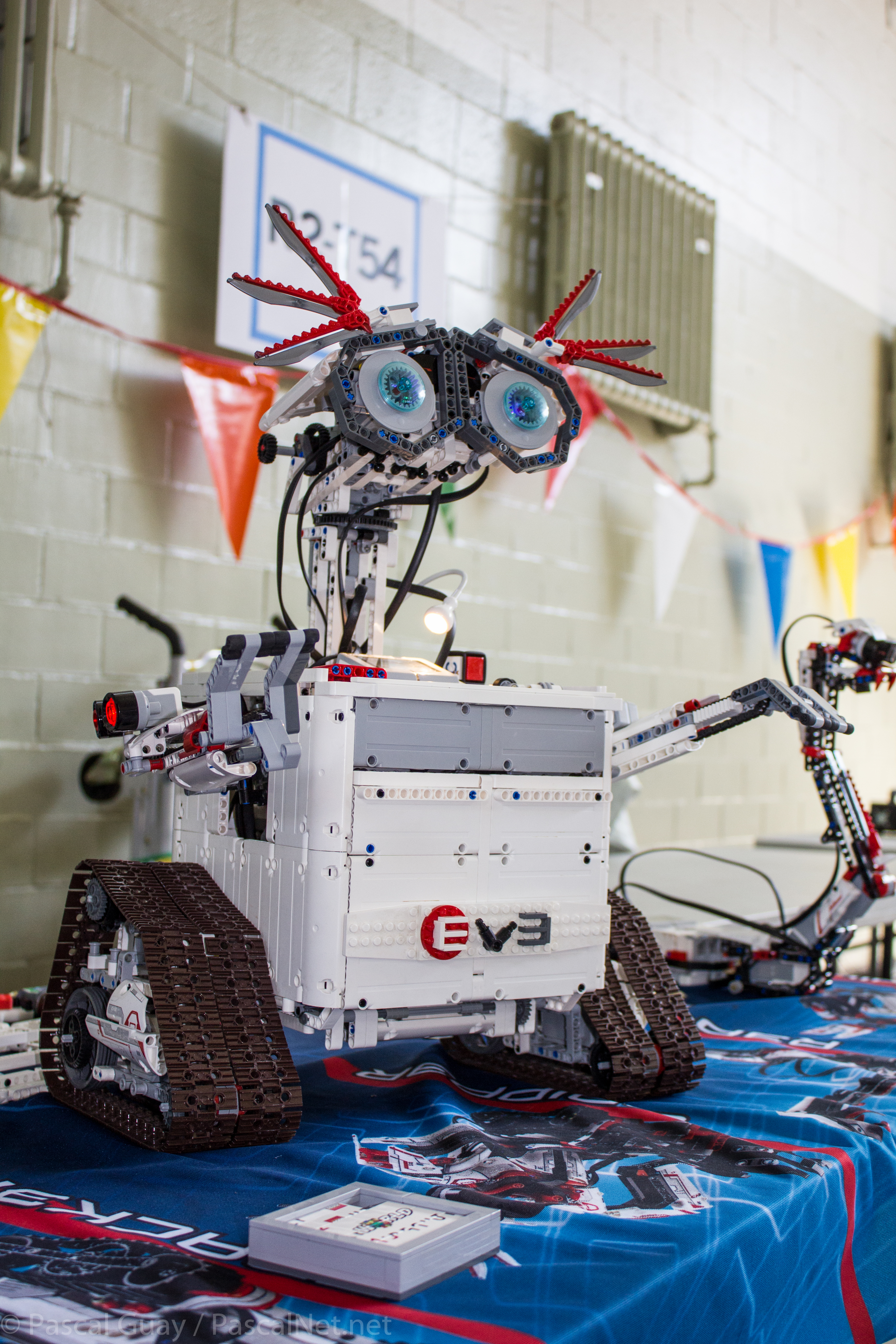
Went to visit the Montreal Montréal Mini Maker Faire today ! Saw cool projects. Here’s a video I recorded from the event:














































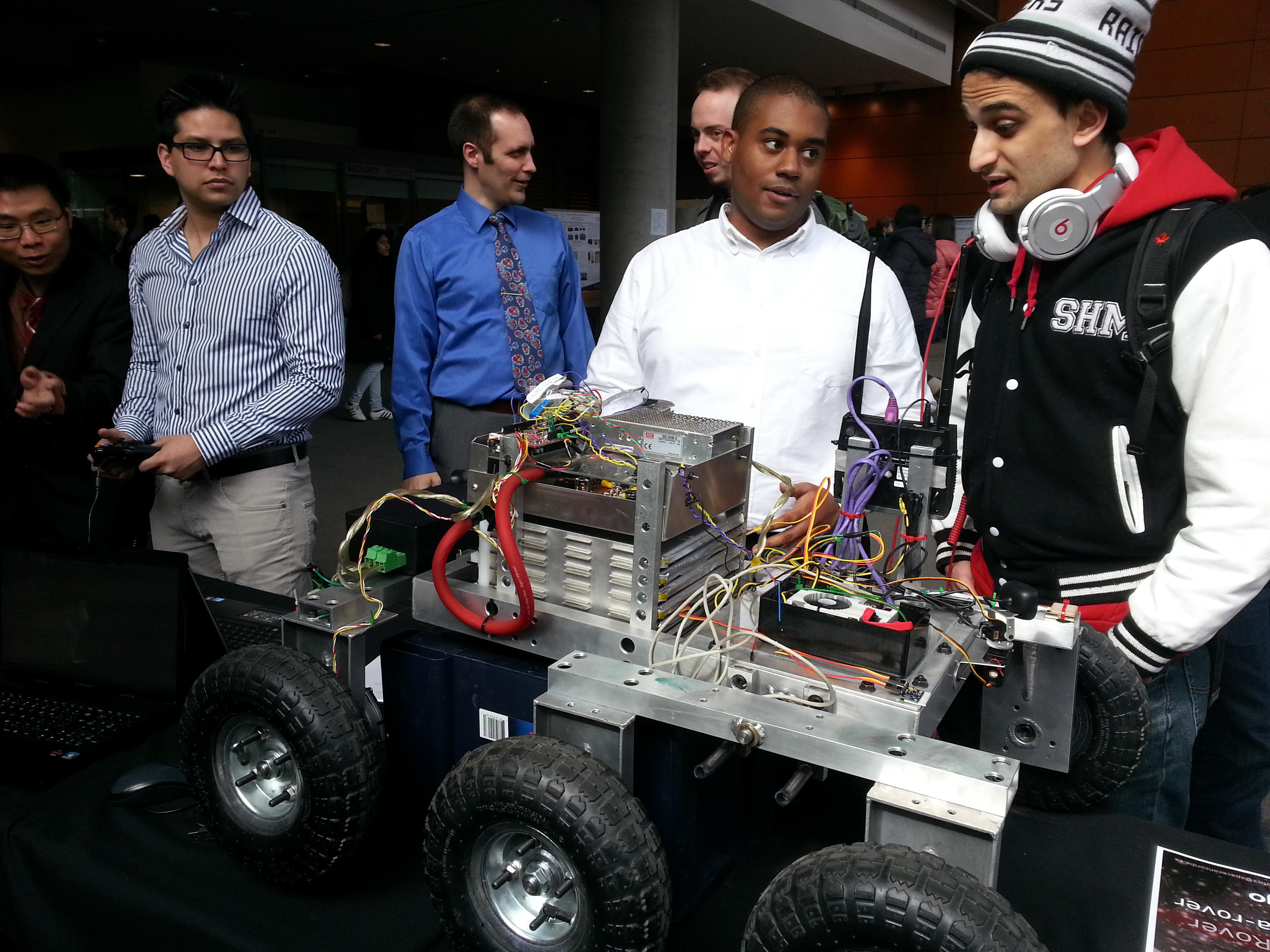
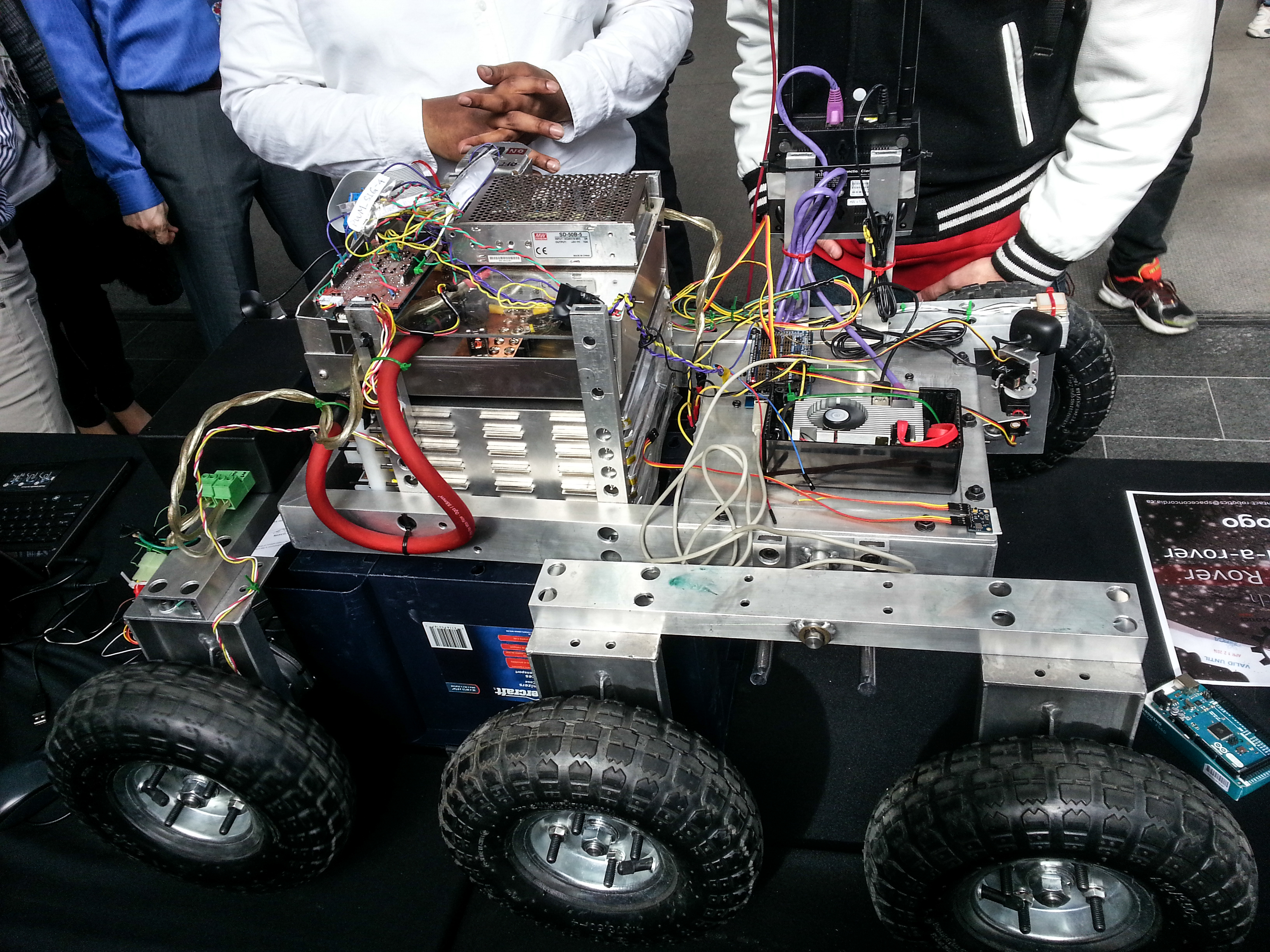
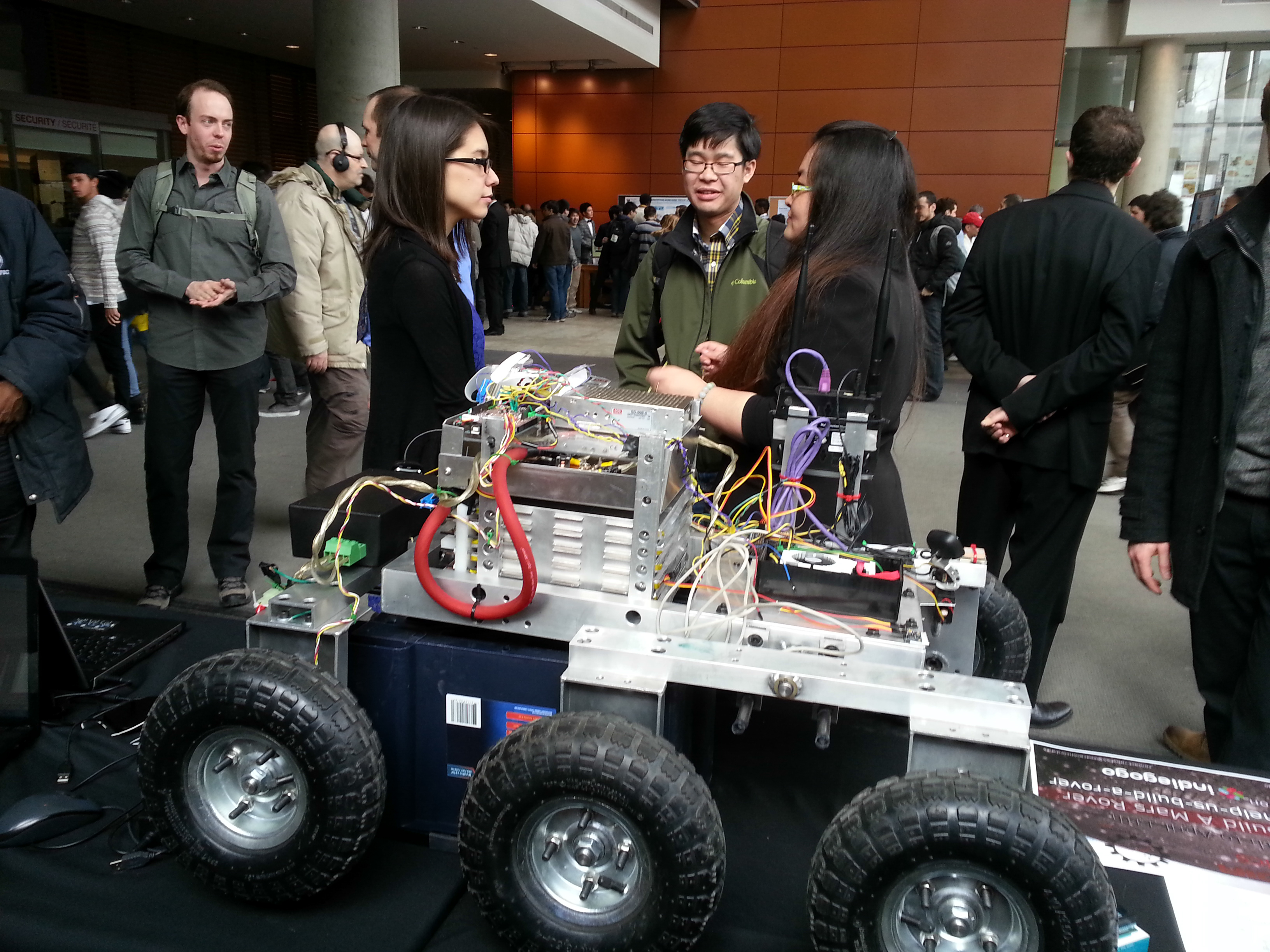
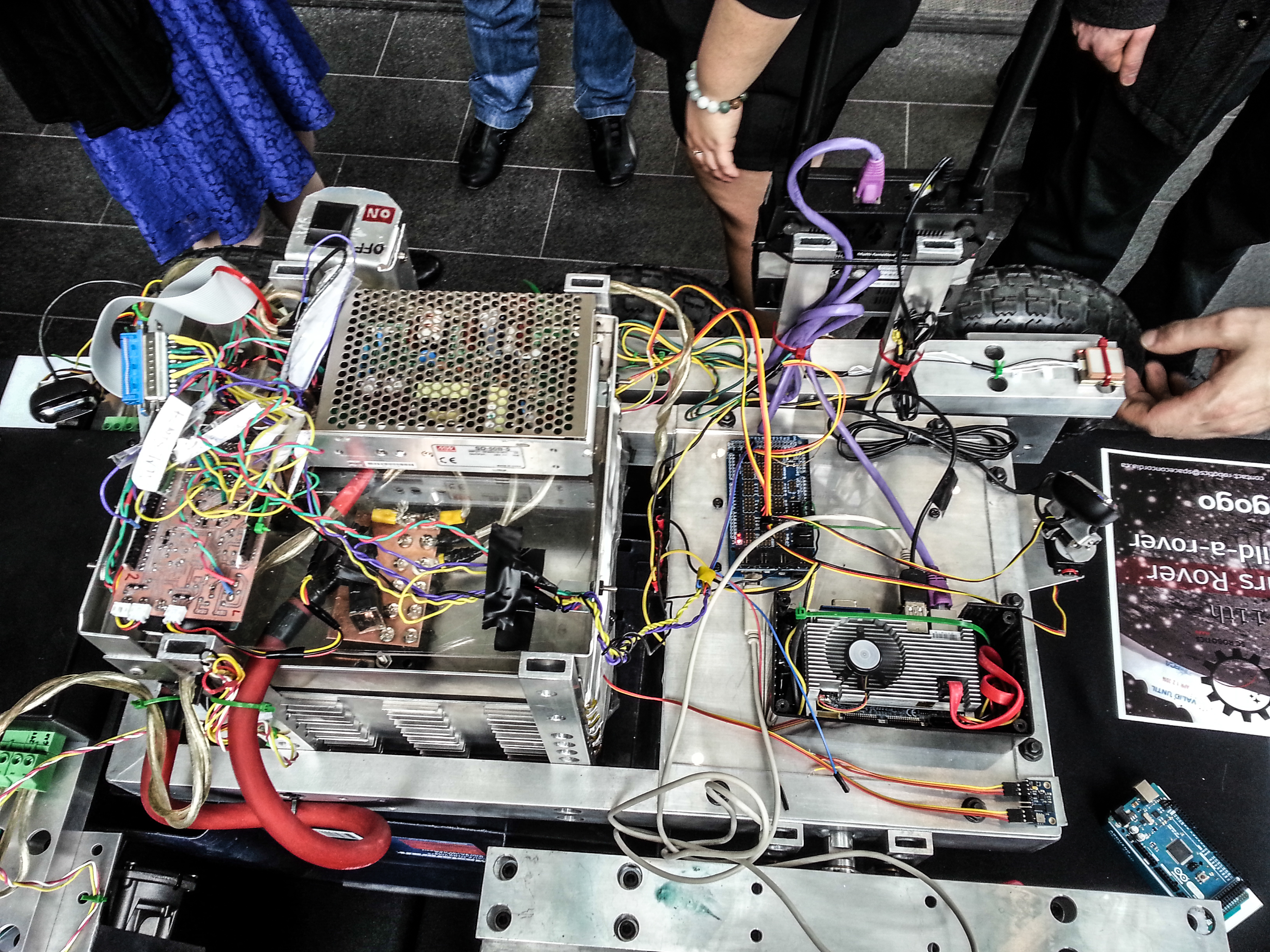
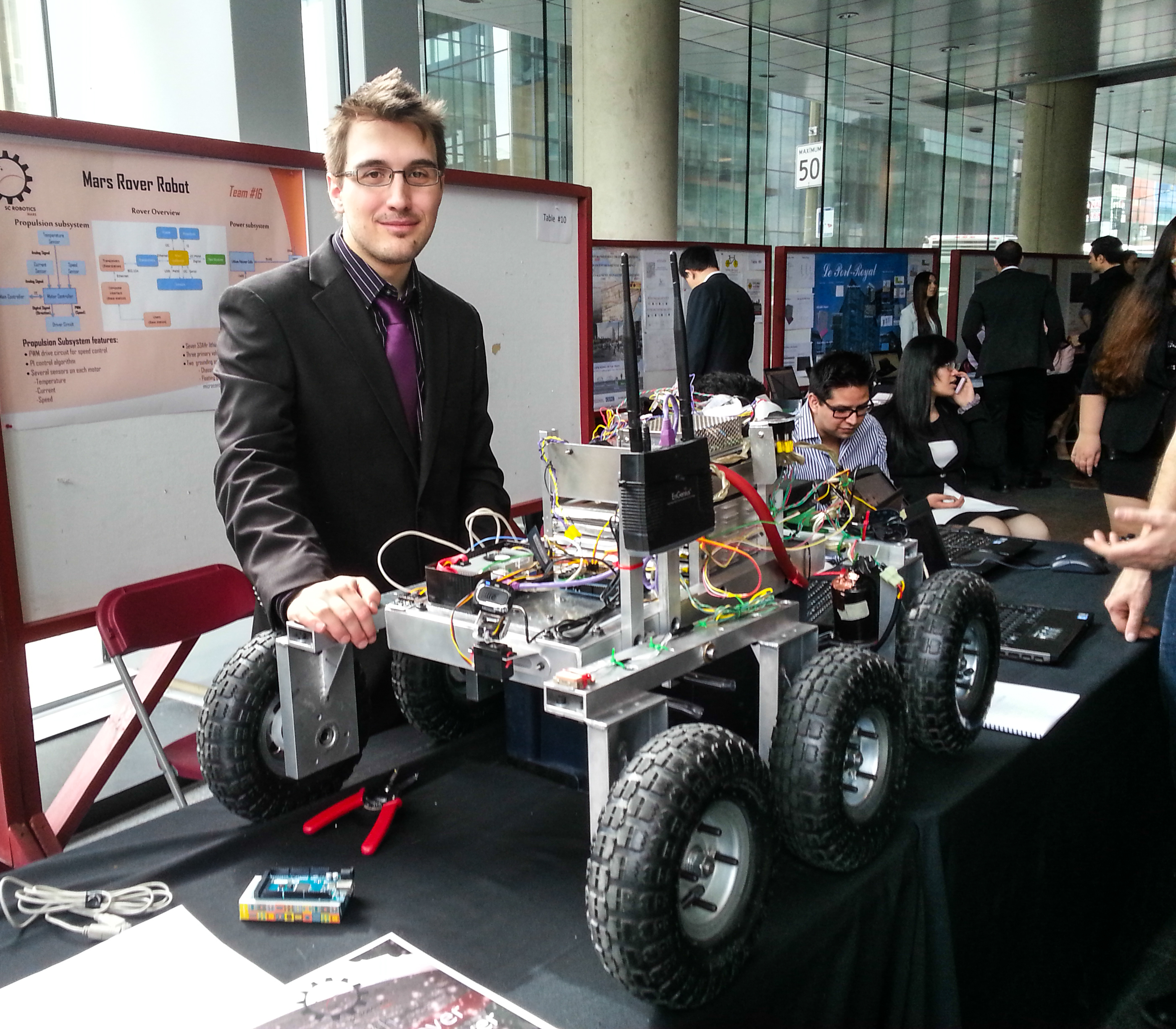
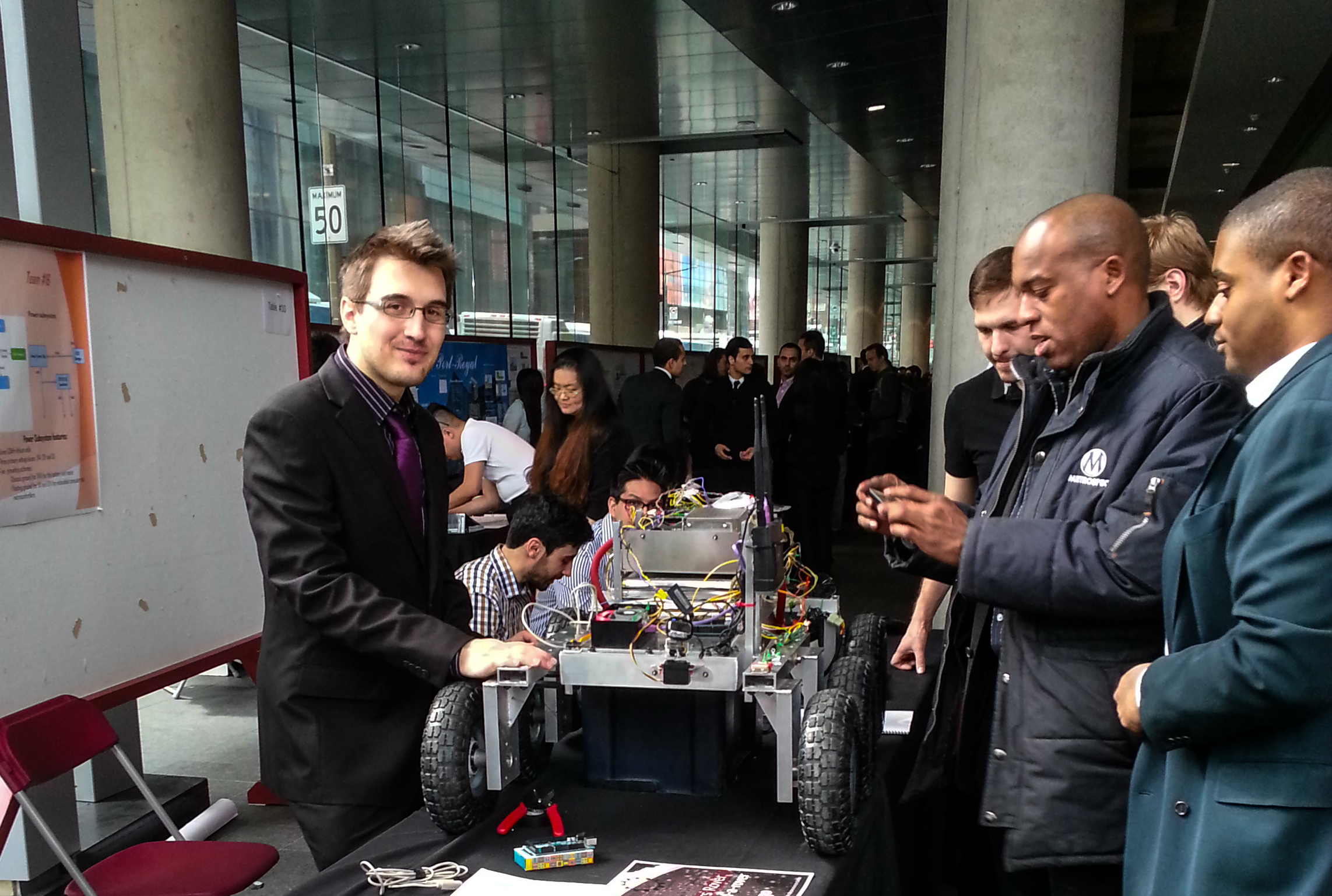
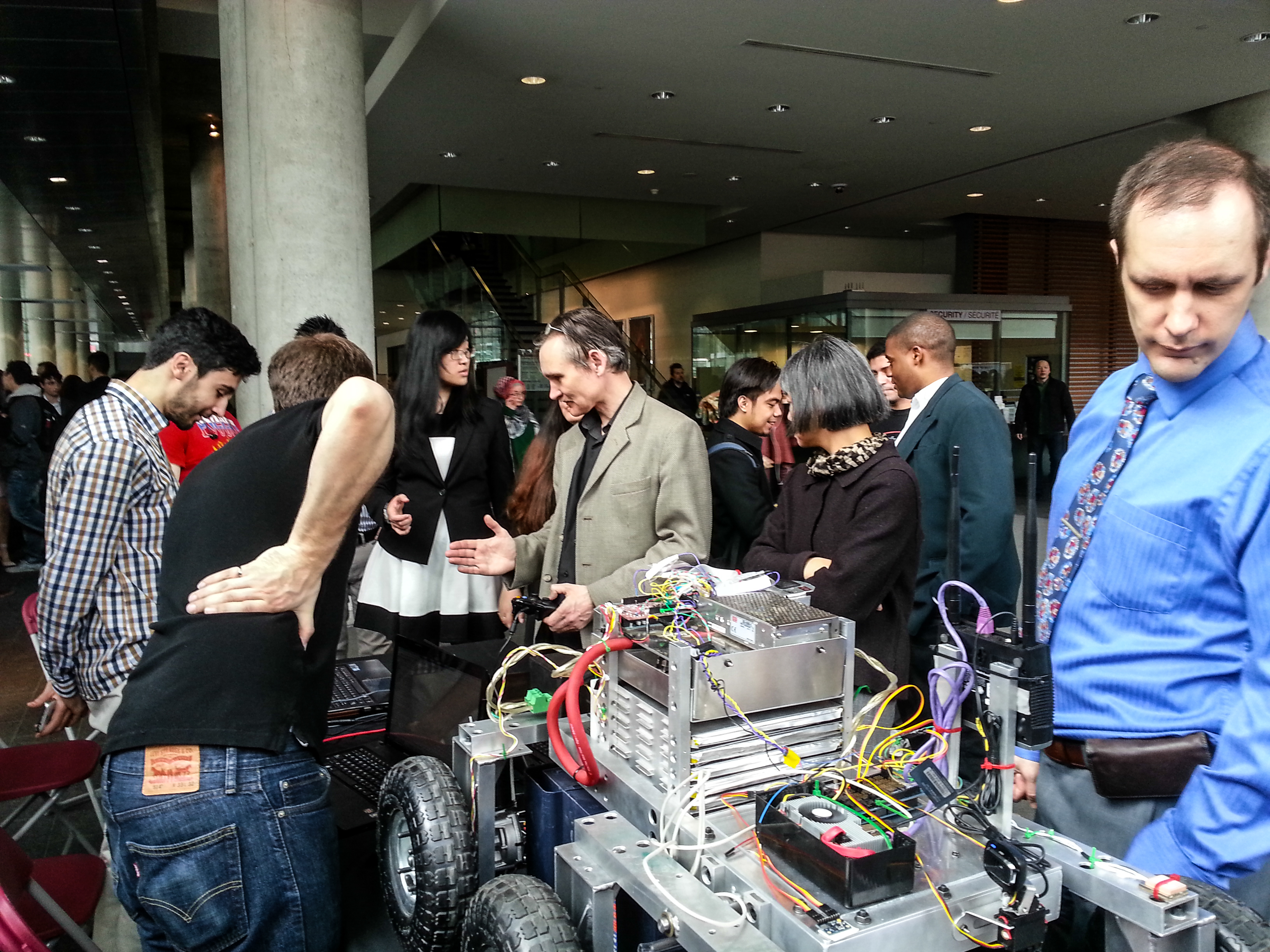
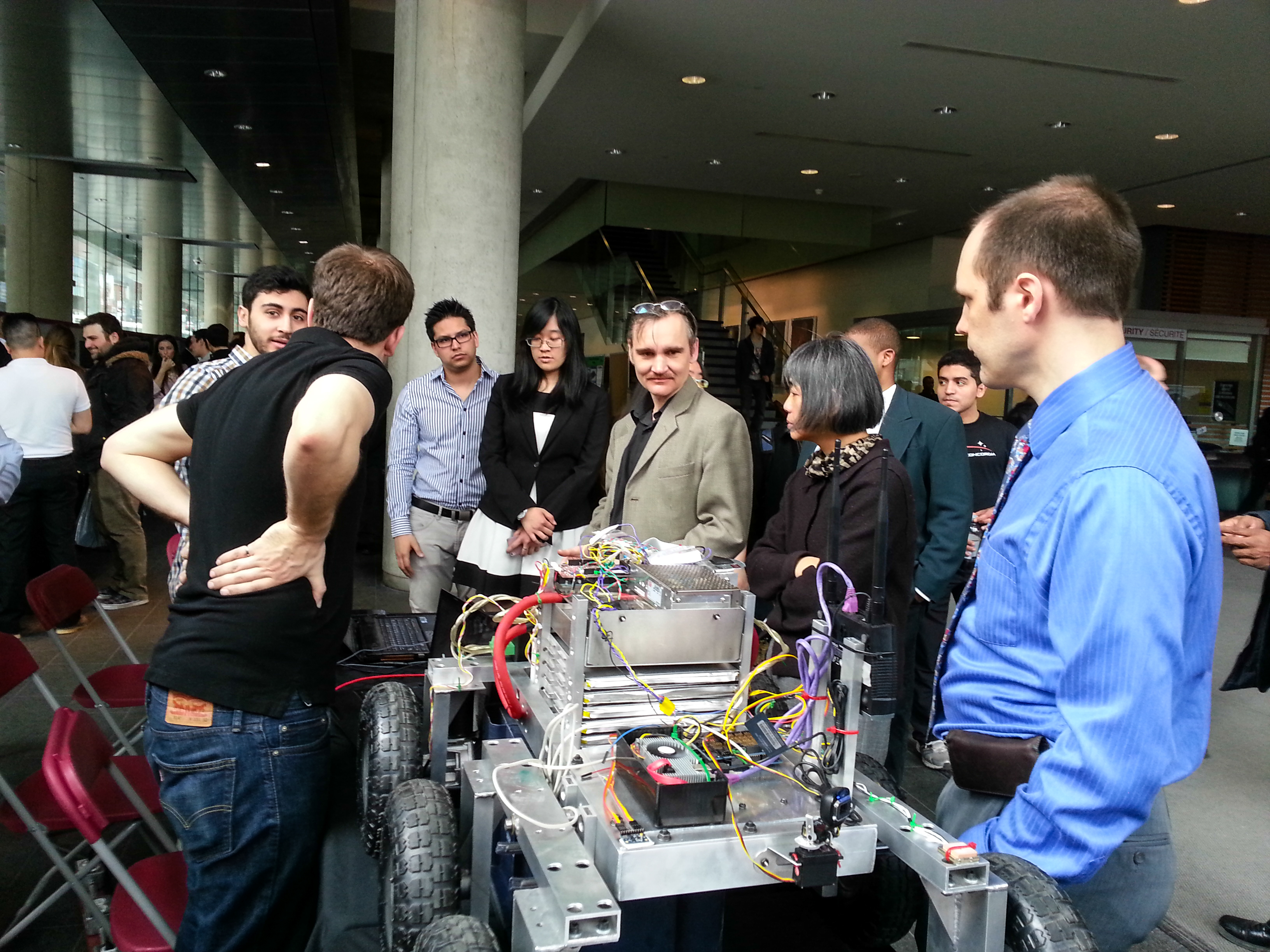
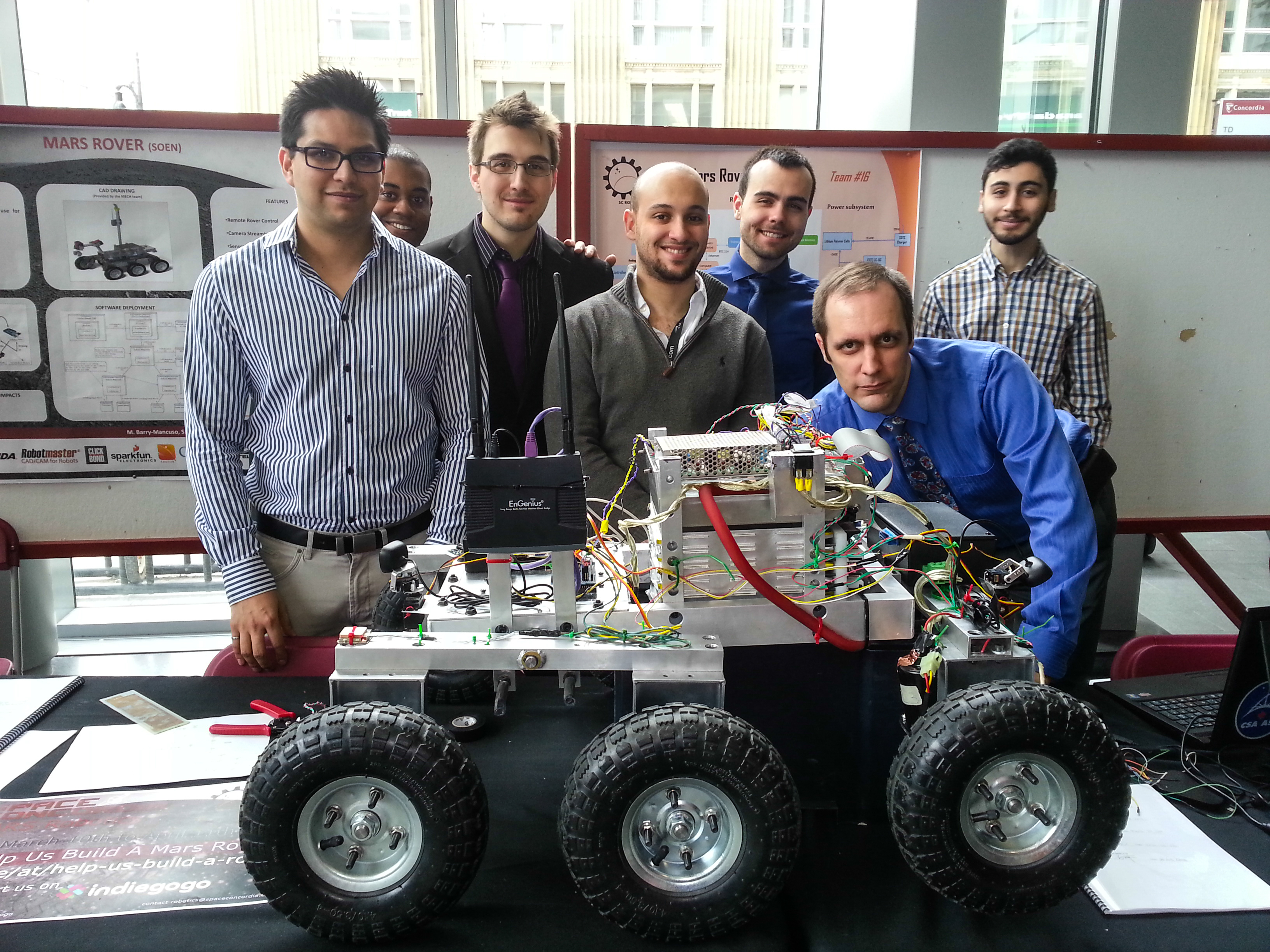
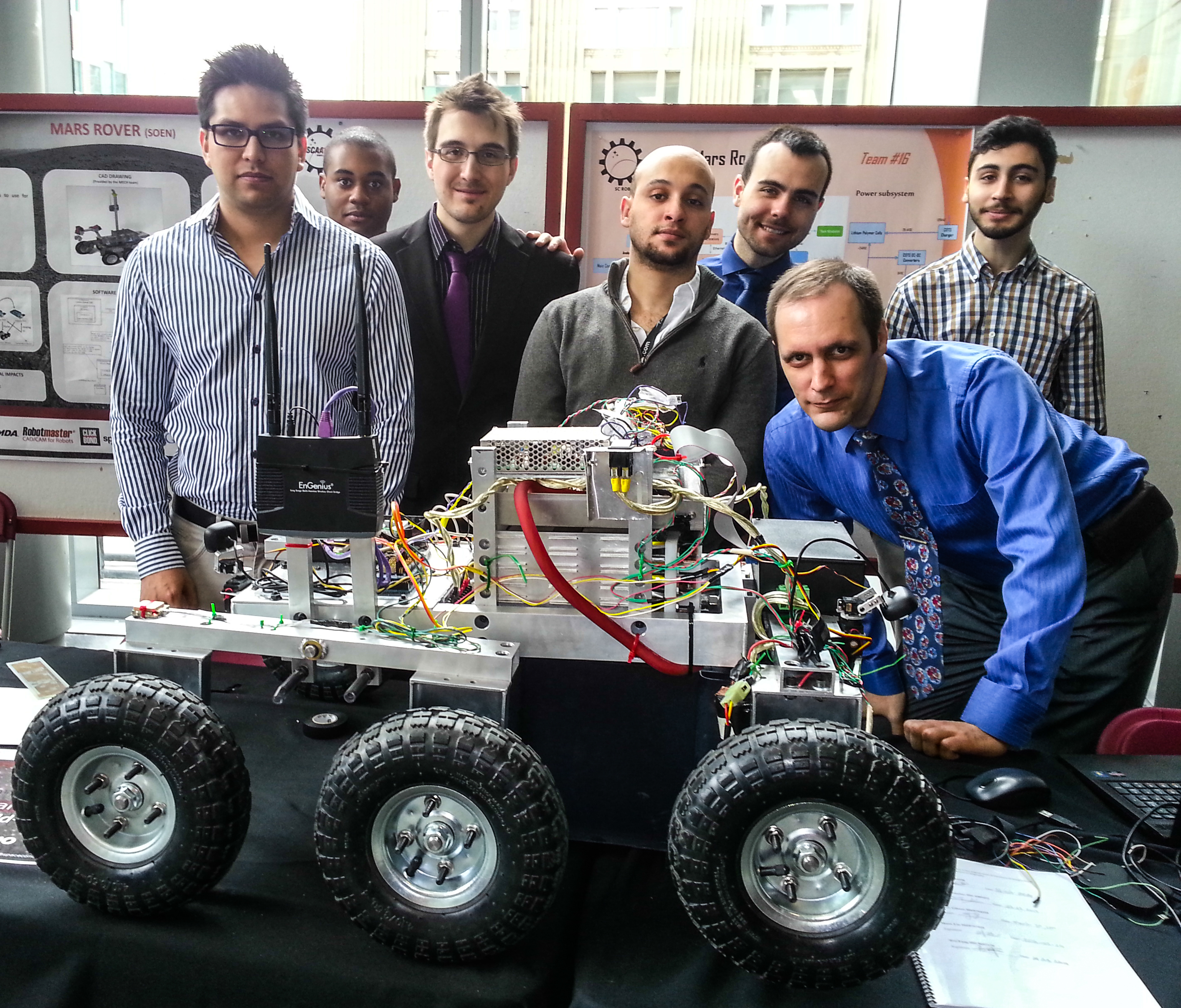
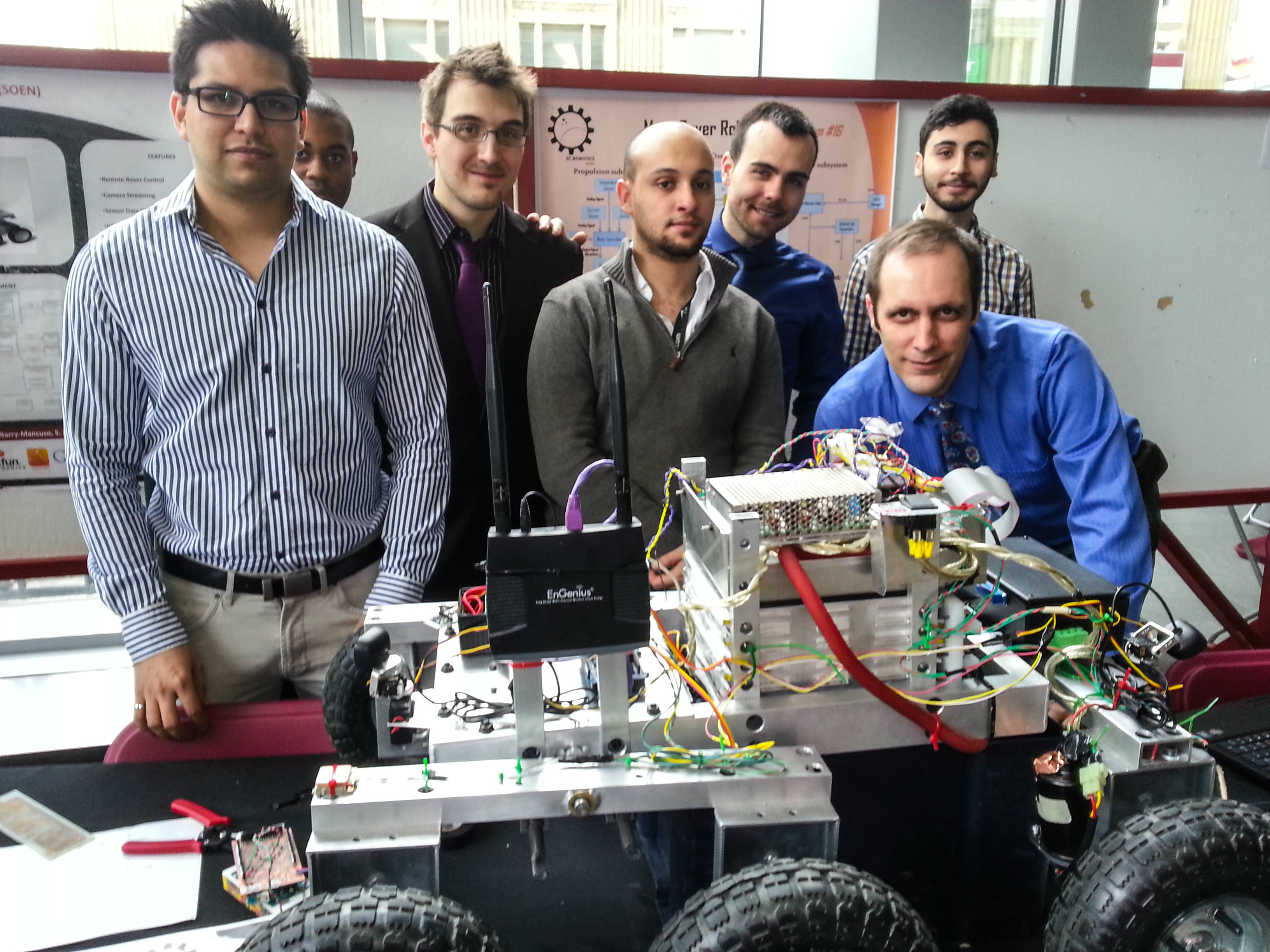
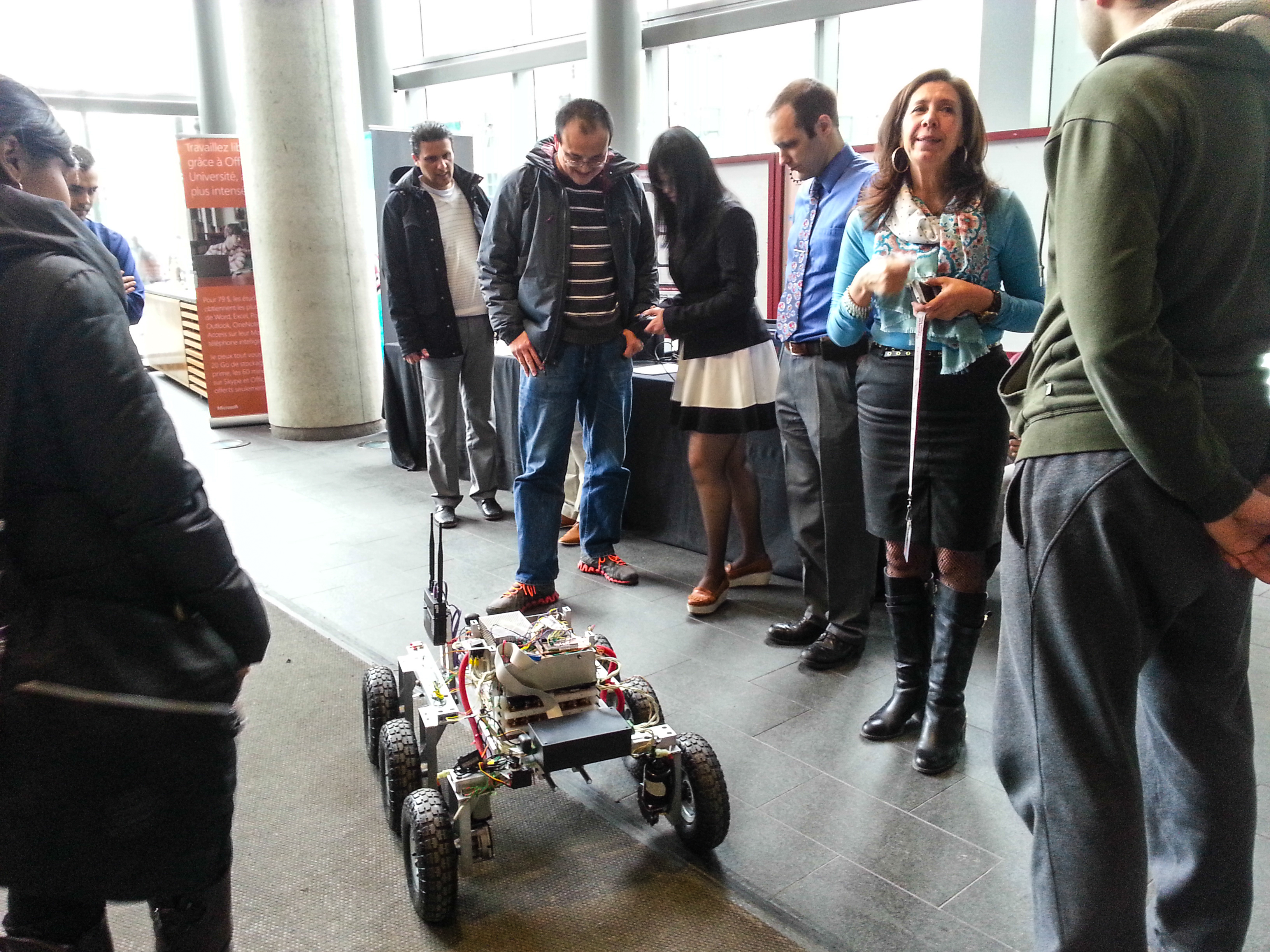
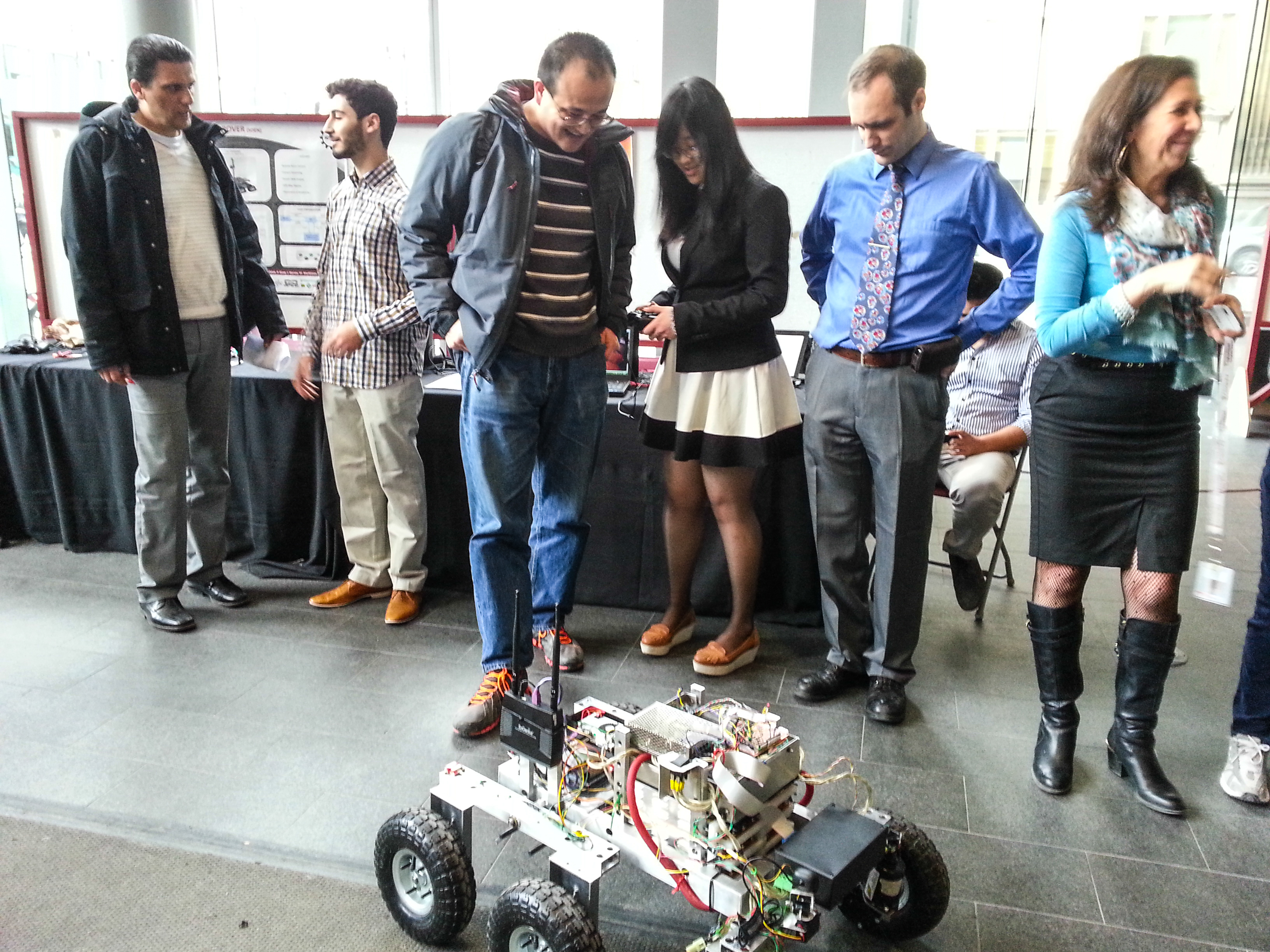
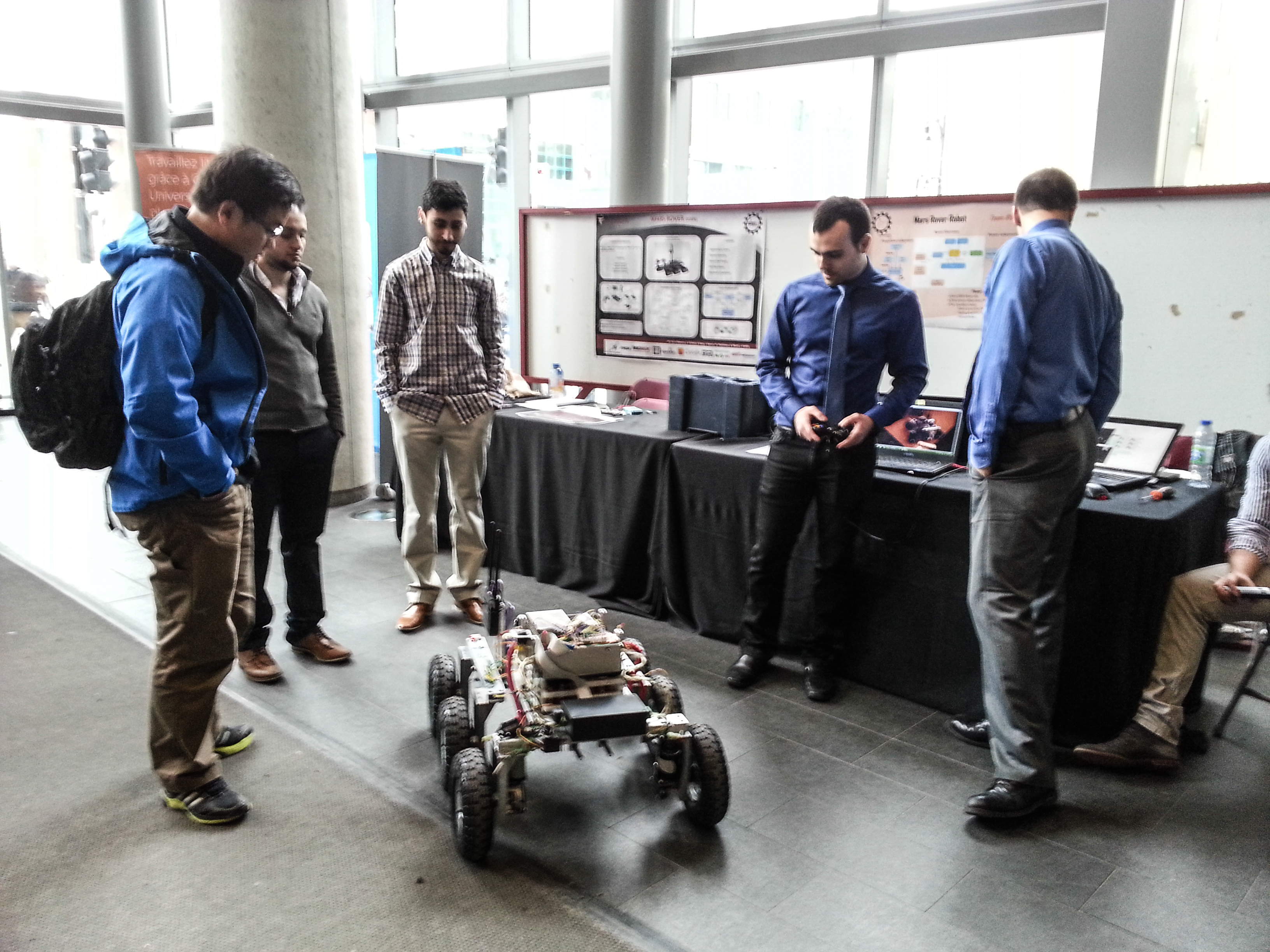
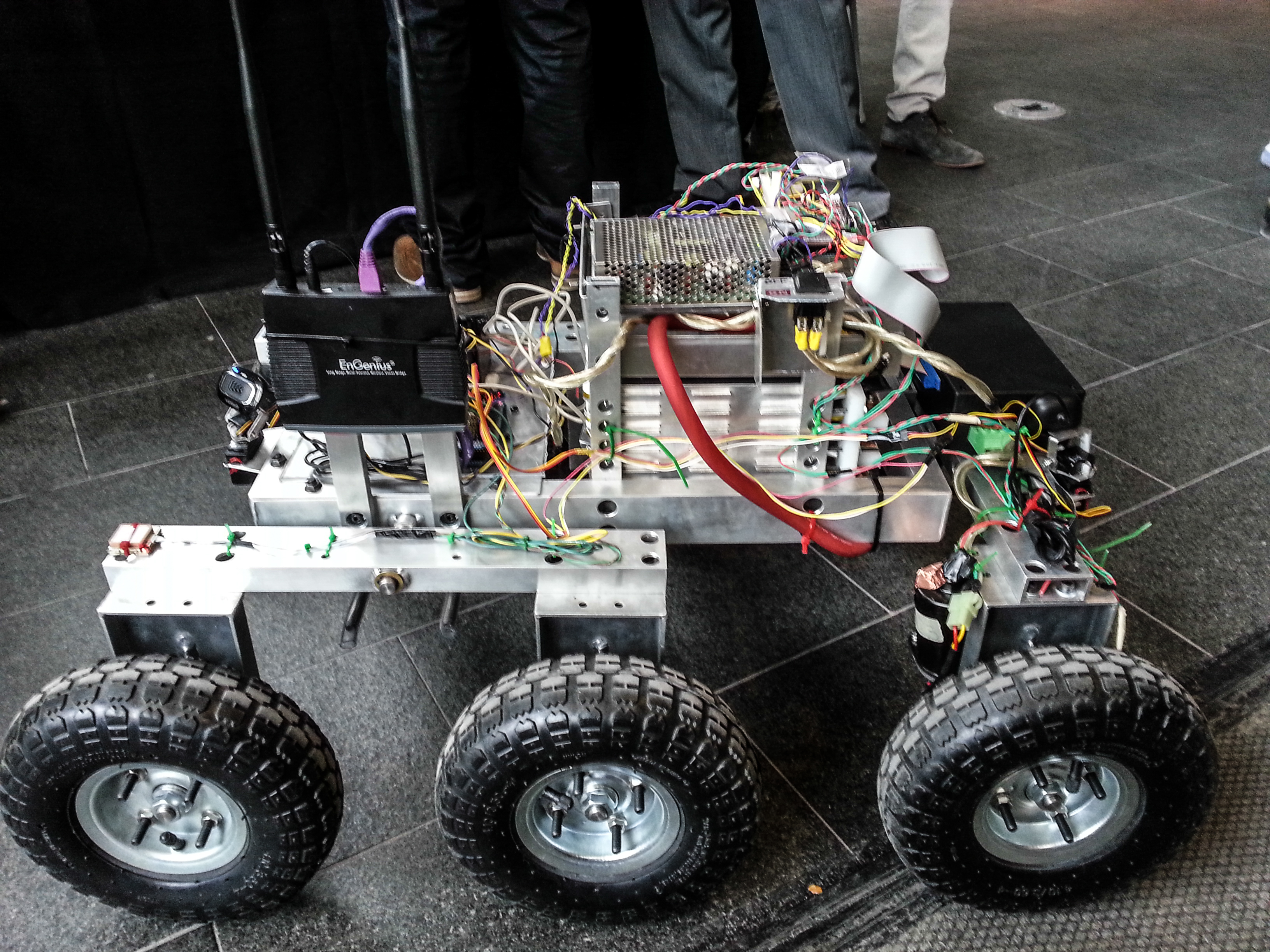
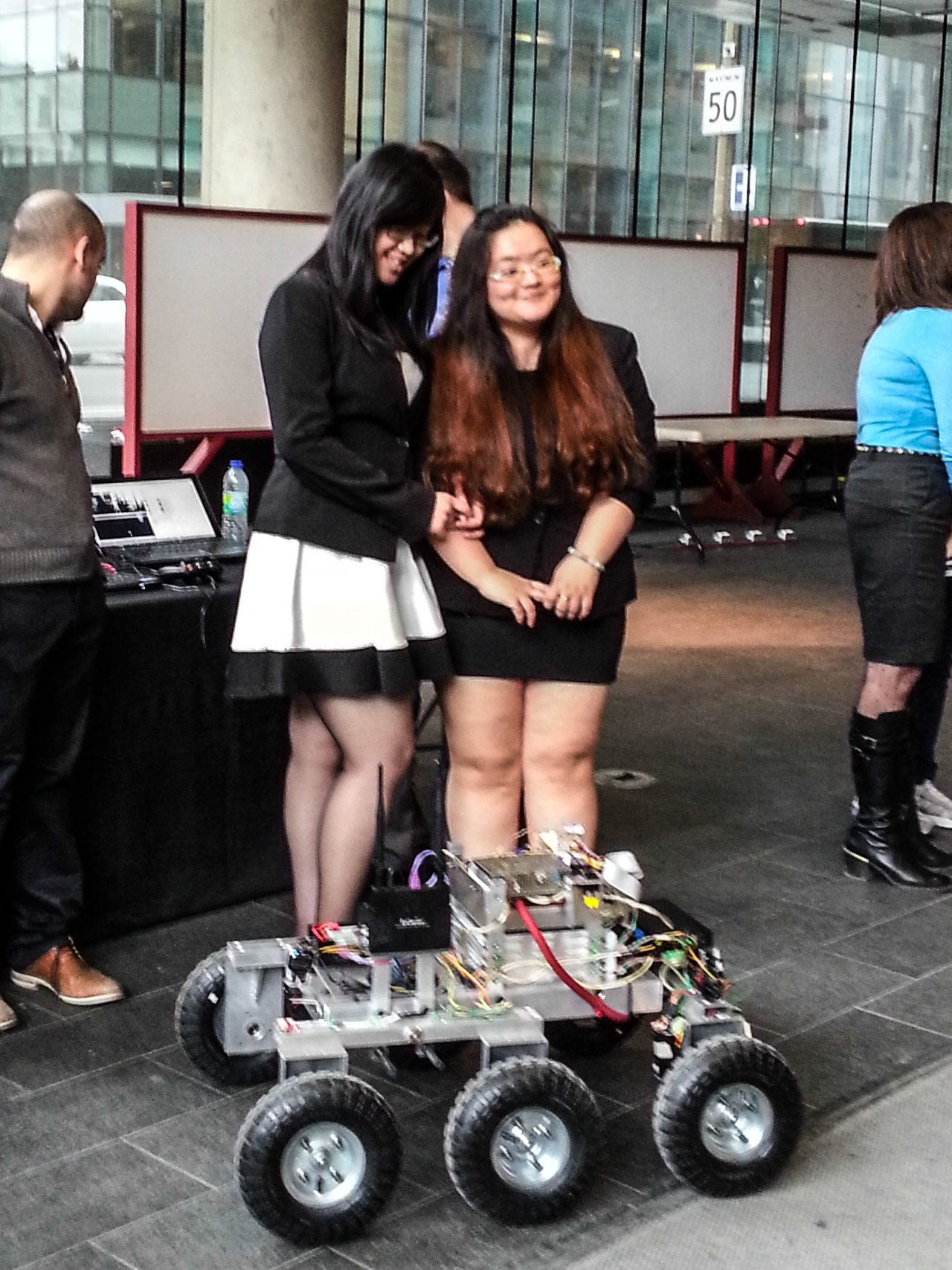
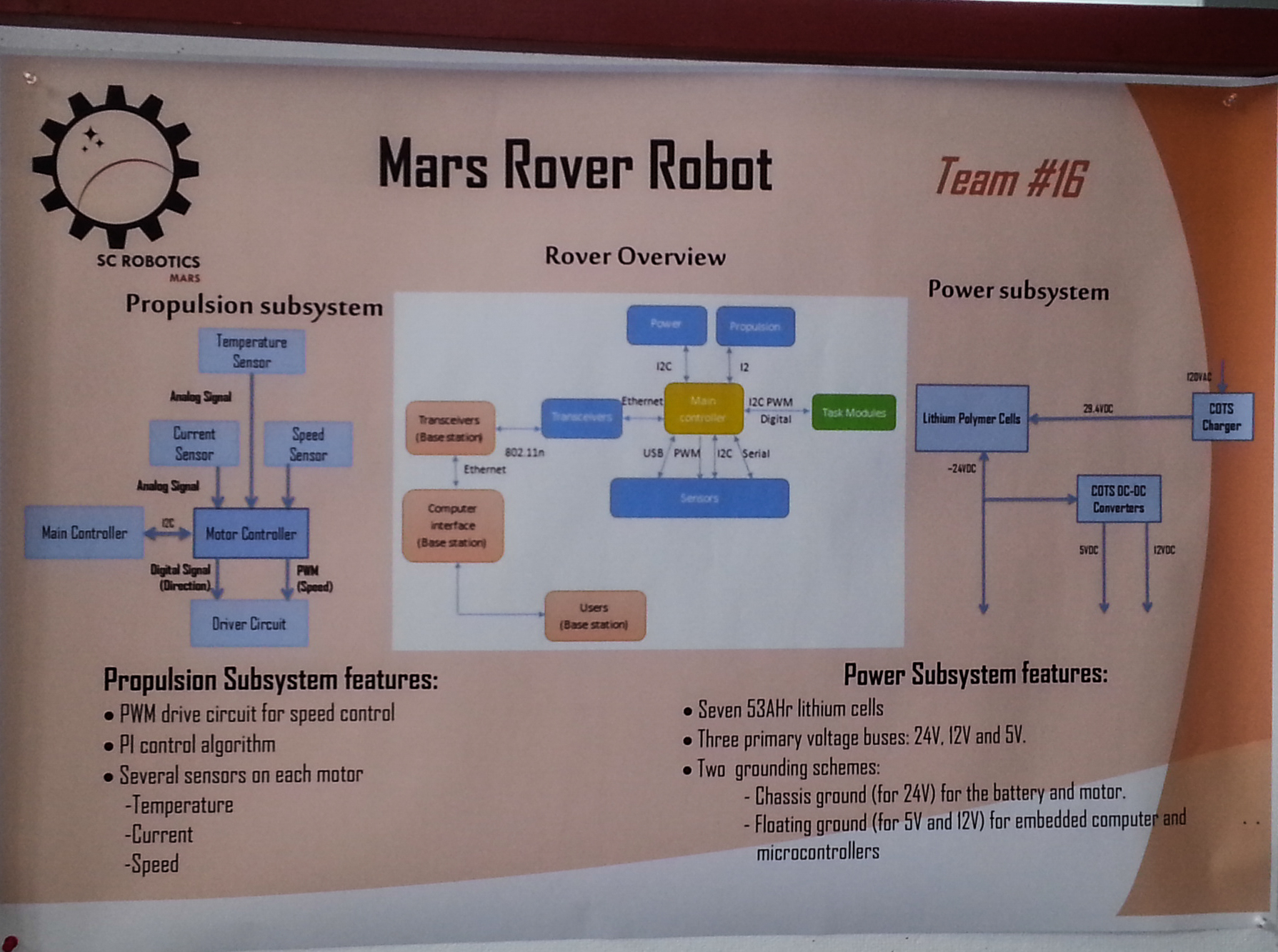
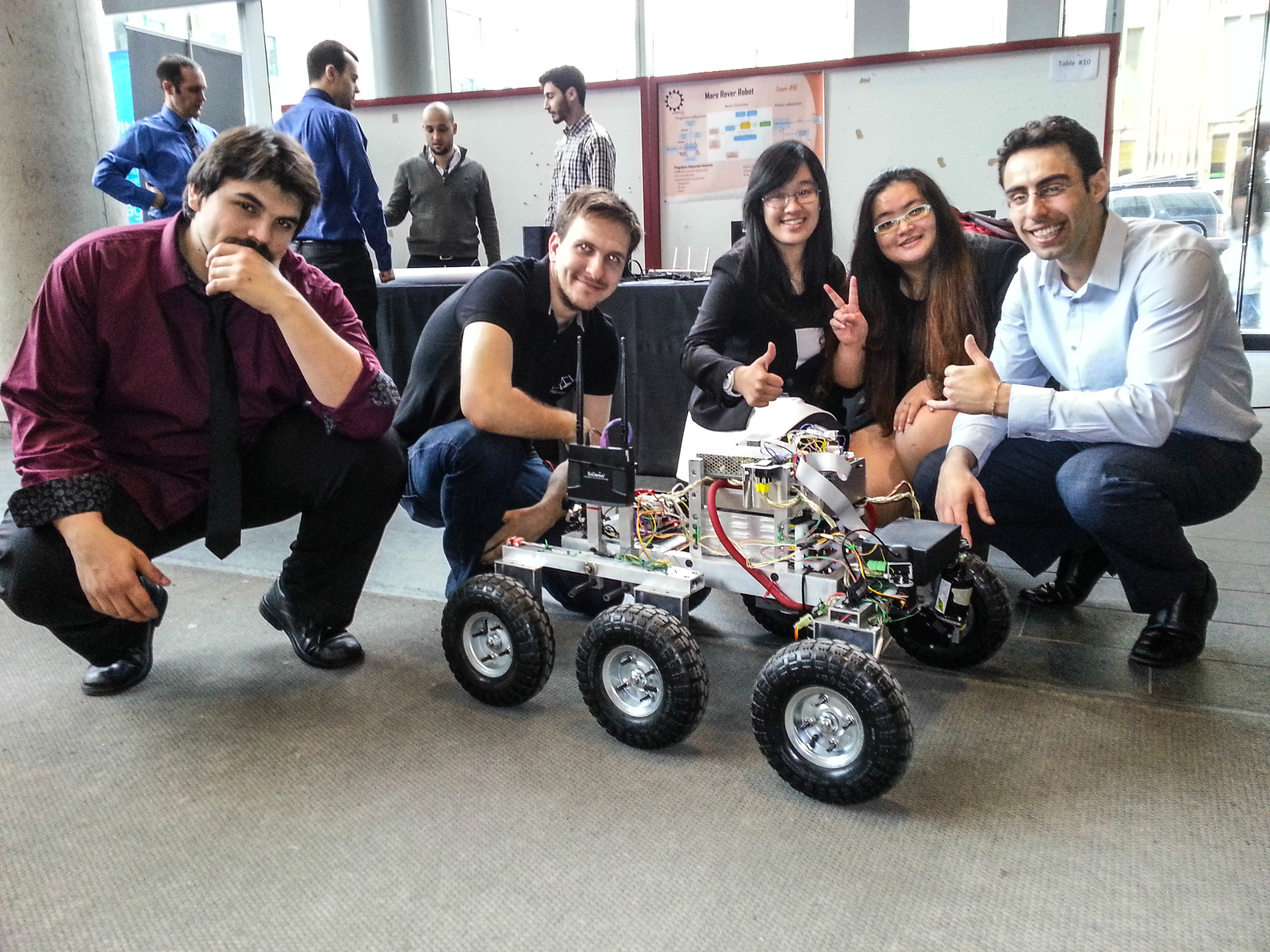
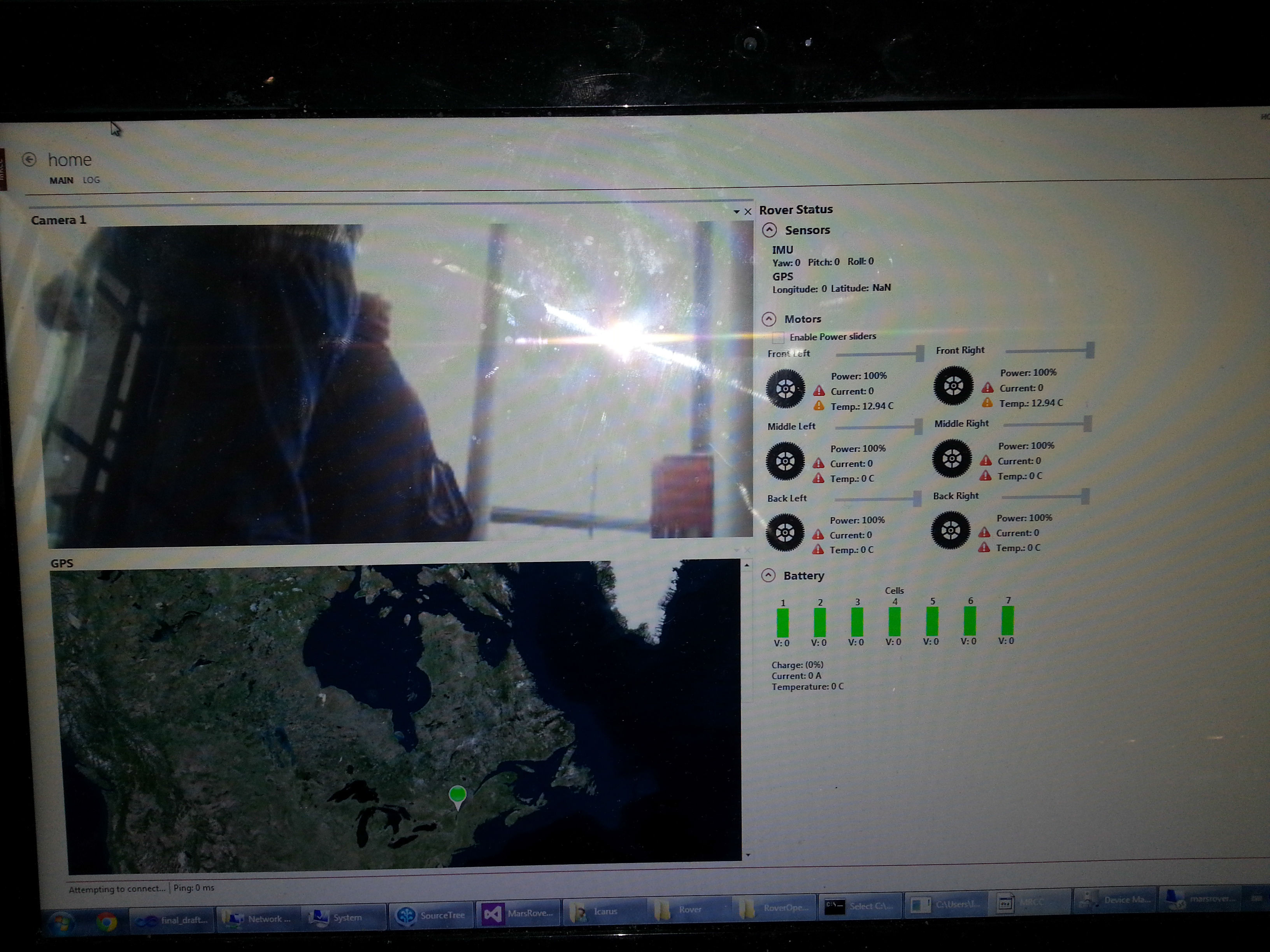
My final project at Concordia University is over, it has been a great experience working with an interdisciplinary team of software, mechanical, electrical, computer and industrial engineering students! I was responsible of programming the embedded computers on board of the rover. The embedded programming was mostly done in, C++ and C# and the operator user interface was done in .NET / MVVM. The Arduino Mega was used on the robot to interface with the multiple sensors and servo motors along with a Pico ITX board in charge of communicating with the operator’s main computer and streaming the cameras.
Here’s an article talking about it on Concordia University’s website: http://www.concordia.ca/cunews/main/stories/2014/04/01/running-on-ice-snowandmars.html
Saved PDF in case the link becomes broken: Concordia Mars Rover 2014 Captstone_Project Article









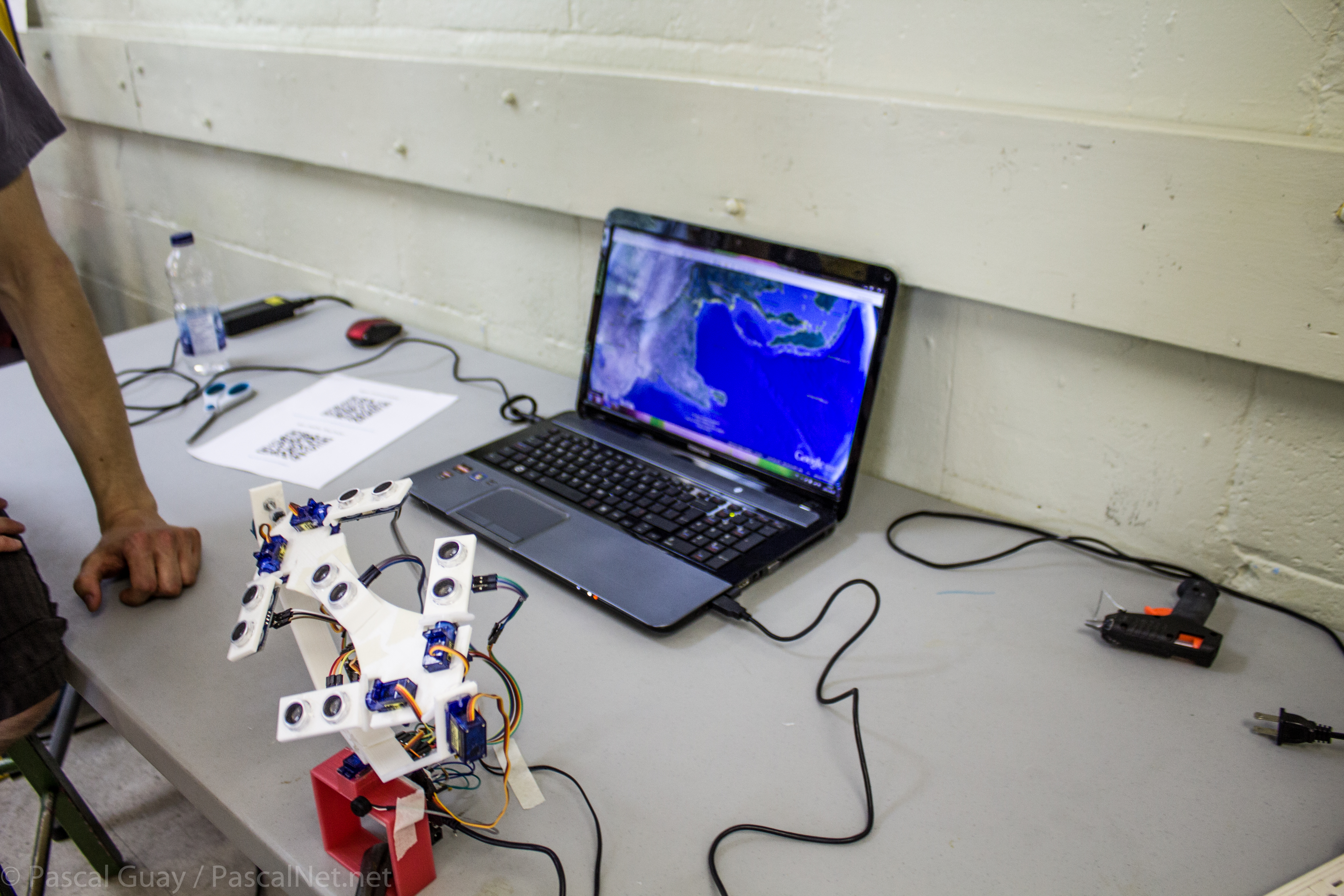
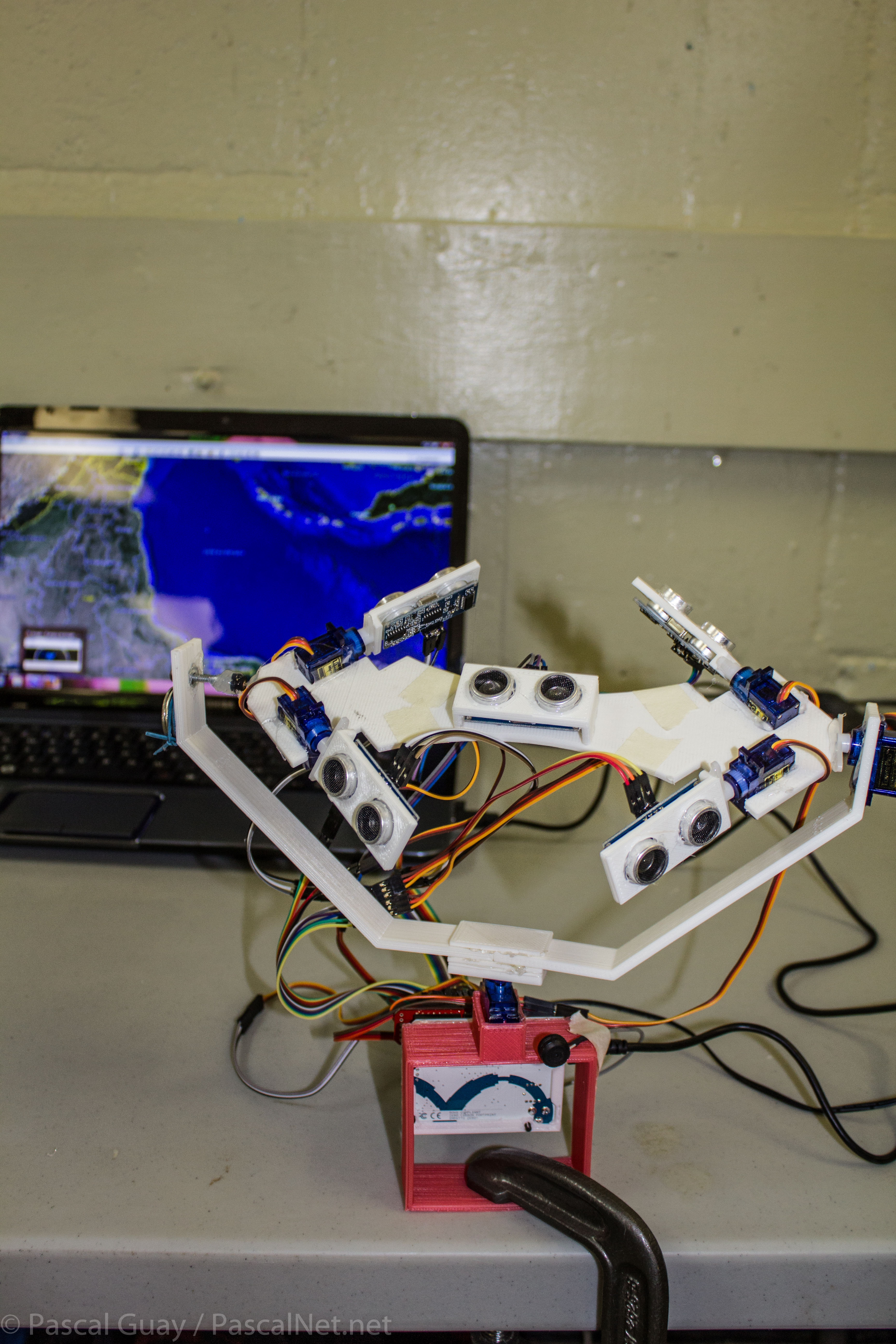
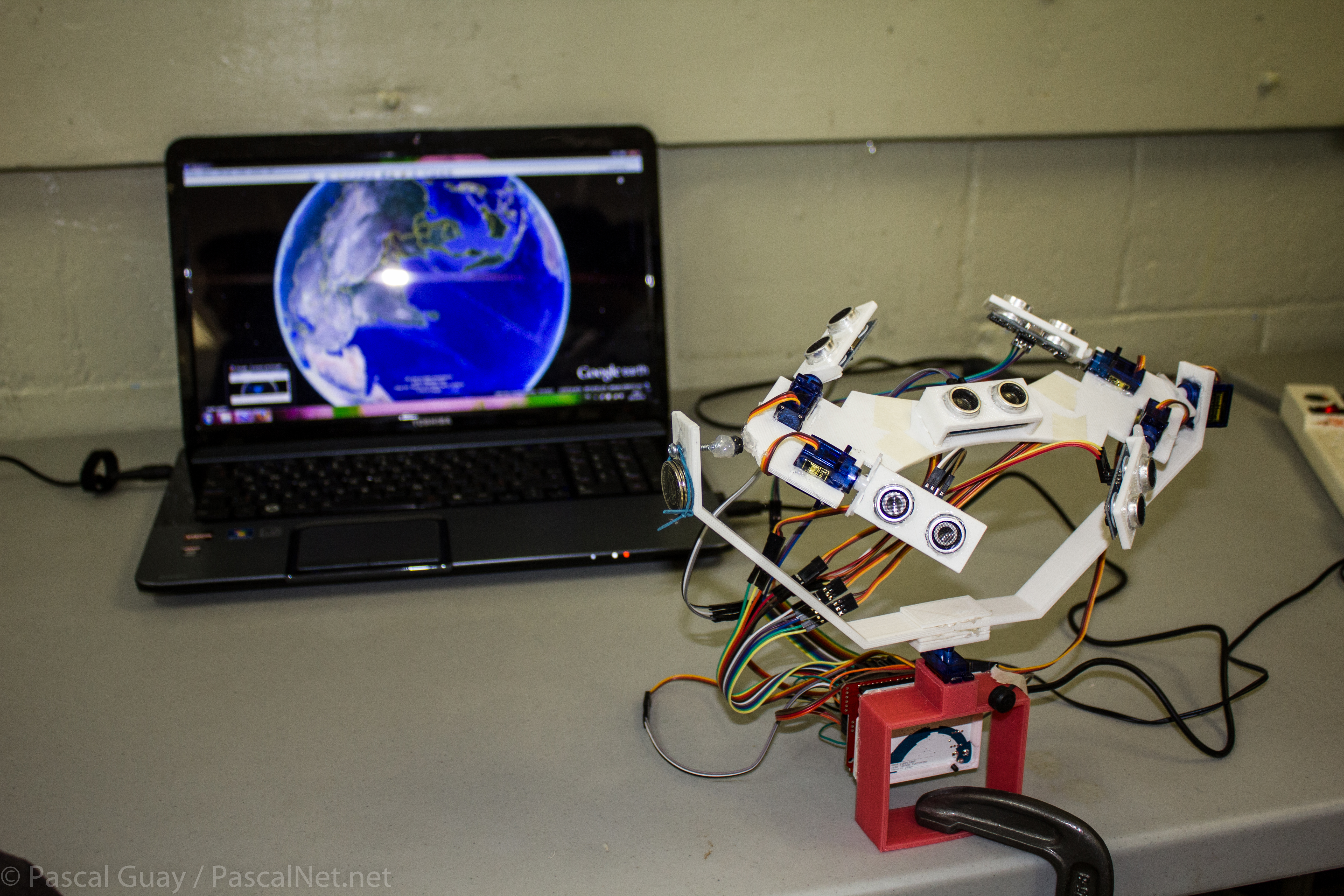
I’m currently participating in the University of Utah Mars Rover competition. I made a small prototype of what an arm or stabilization system could look like on the robot.
Material: three 9G micro servo, one 9 DOF IMU, an Arduino Uno with a Sensor Shield V5.0 mounted on top
Here’s a stabilizer mode instead of an arm mimicking mode, useful to keep certain objects stable while they are mounted on a moving vehicle encountering bumps and obstacles.

Here’s a free sample microcontroller I got last month from STMicroelectronics.
http://www.st.com/internet/evalboard/product/254044.jsp

Got it for $4.99 in pre-order at the start of September, two months later I received it!