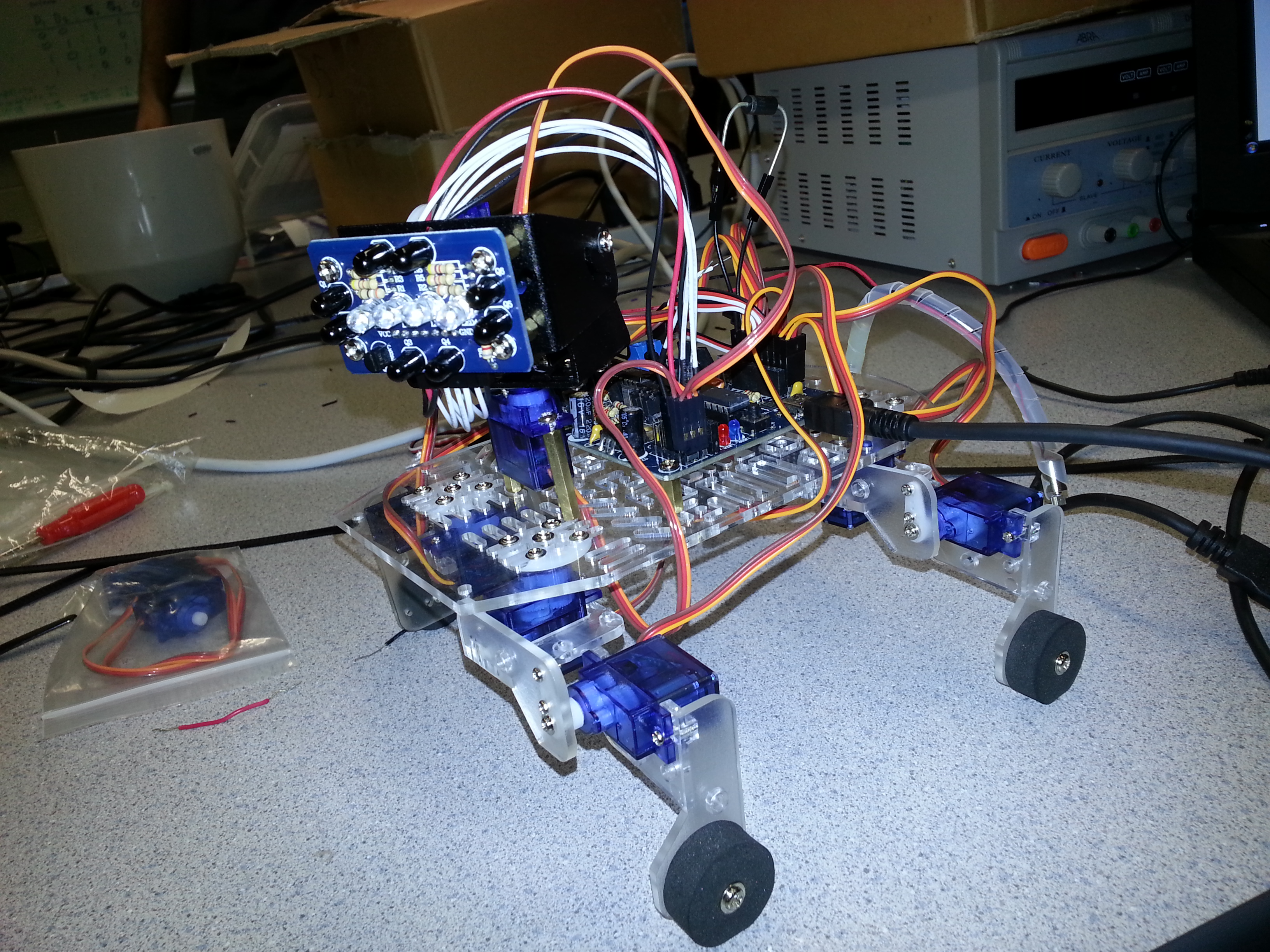
I’m currently participating in the University of Utah Mars Rover competition. I made a small prototype of what an arm or stabilization system could look like on the robot.
Material: three 9G micro servo, one 9 DOF IMU, an Arduino Uno with a Sensor Shield V5.0 mounted on top
Here’s a stabilizer mode instead of an arm mimicking mode, useful to keep certain objects stable while they are mounted on a moving vehicle encountering bumps and obstacles.